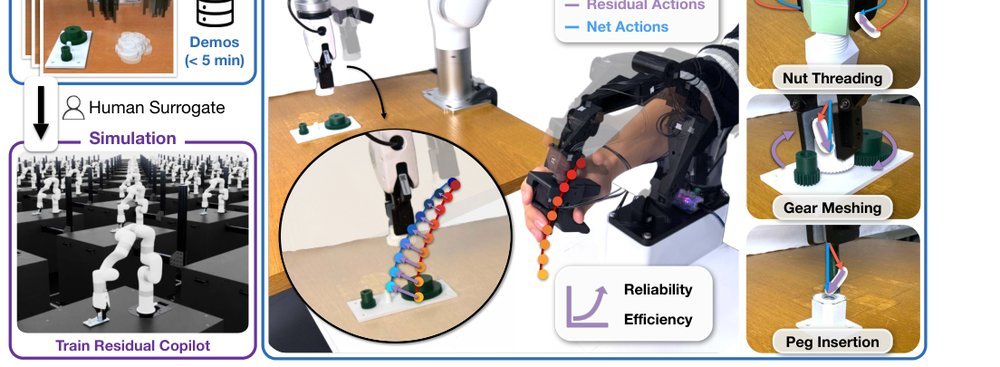
Efficient and Reliable Teleoperation through Real-to-Sim-to-Real Shared Autonomy
作者:Shuo Sha, Yixuan Wang, Binghao Huang, Antonio Loquercio, Yunzhu Li · 单位:Columbia University, University of Pennsylvania · 会议/期刊:arXiv · 日期:2026-03-17 · 来源:Bottlenecks / Data Collection and Utilization / Data Collection strategy