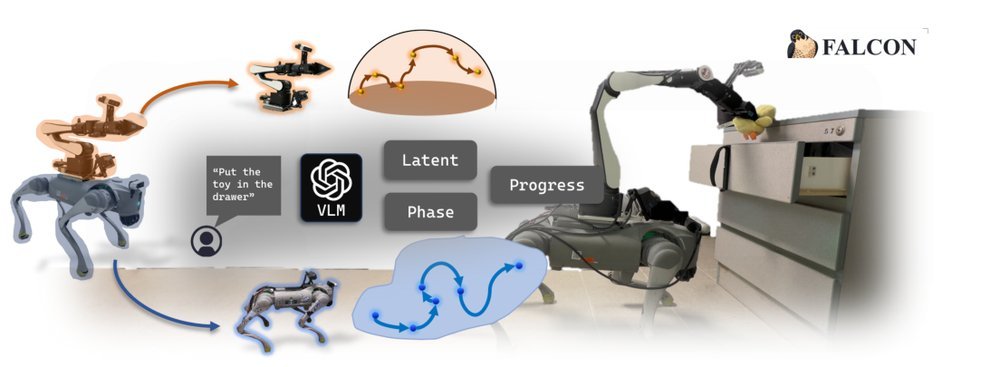
FALCON: Actively Decoupled Visuomotor Policies for Loco-Manipulation with Foundation-Model-Based Coordination
作者:Chengyang He, Ge Sun, Yue Bai, Junkai Lu, Jiadong Zhao, Guillaume Sartoretti · 单位:Department of Mechanical Engineering, College of Design and Engineer, ing, National University of Singapore · 会议/期刊:arXiv · 日期:2025-12-04 · 来源:Manipulation Tasks / Quadrupedal Manipulation / VLA