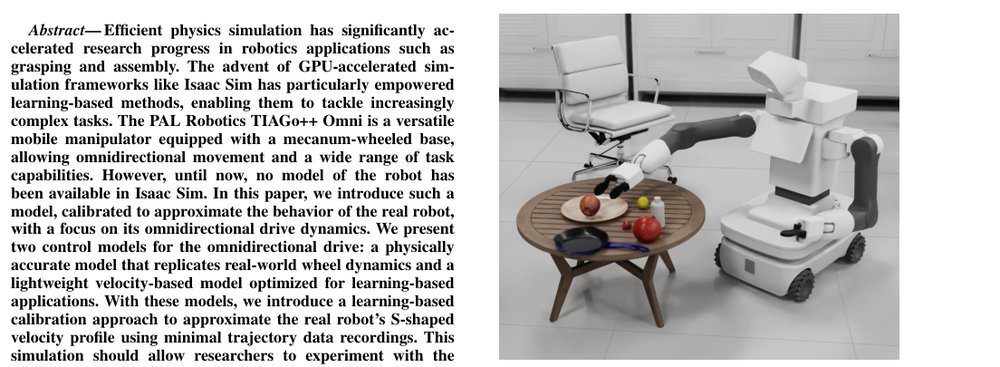
作者:Vincent Schoenbach, Marvin Wiedemann, Raphael Memmesheimer, Malte Mosbach, Sven Behnke · 单位:Fraunhofer Institute for Material Flow and Logistics, Dortmund, Germany · 会议/期刊:CASE 2025 · 日期:2025-10-11 · 来源:Manipulation Tasks | Mobile Manipulation / Mobile Manipulation / Robot Design | Robot Design