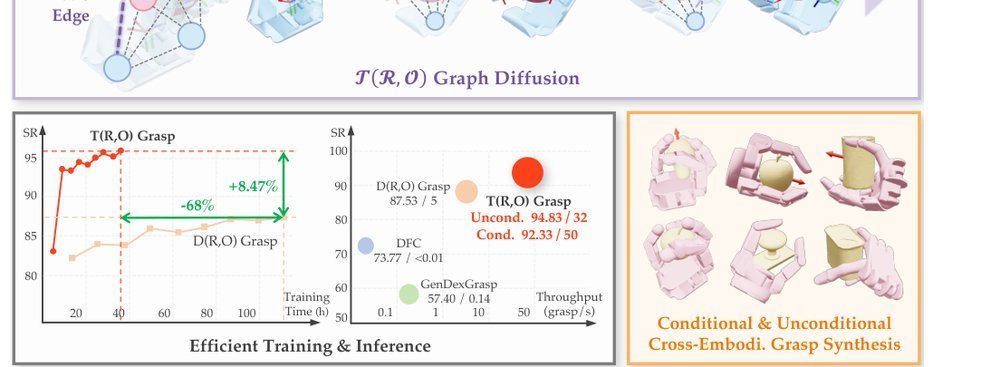
T(R,O) Grasp: Efficient Graph Diffusion of Robot-Object Spatial Transformation for Cross-Embodiment Dexterous Grasping
作者:Xin Fei, Zhixuan Xu, Huaicong Fang, Tianrui Zhang, Lin Shao · 单位:Department of Computer Science, National University of Singapore, College of Control Science and Engineering, Zhejiang University · 会议/期刊:ICRA 2026 · 日期:2025-10-14 · 来源:Manipulation Tasks / Grasp / Dexterous Grasp