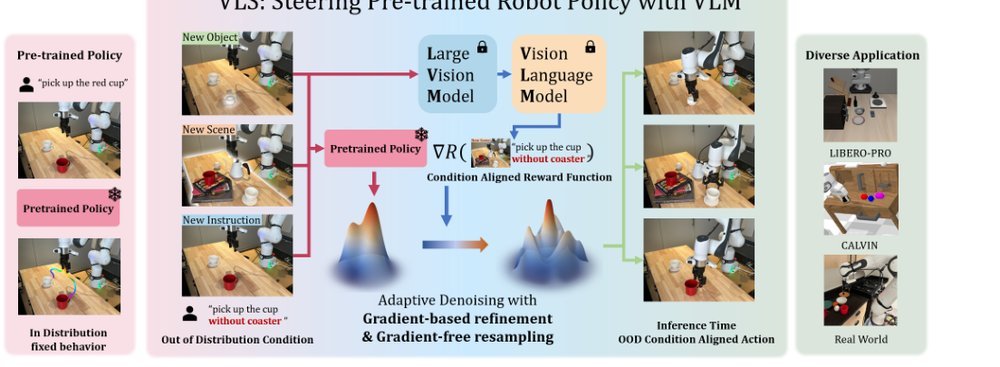
VLS: Steering Pretrained Robot Policies via Vision-Language Models
作者:Vision–Language Models Shuo Liu, Ishneet Sukhvinder Singh, Yiqing Xu, Jiafei Duan, Ranjay Krishna · 单位:University of Washington, University of Oxford, National University of Singapore, Allen Institute for Artificial Intelligence · 会议/期刊:arXiv · 日期:2026-02-03 · 来源:High-Level Structured Planning / Programmatic Planning