主页
返回索引
CoRL 2025 / Oral #39
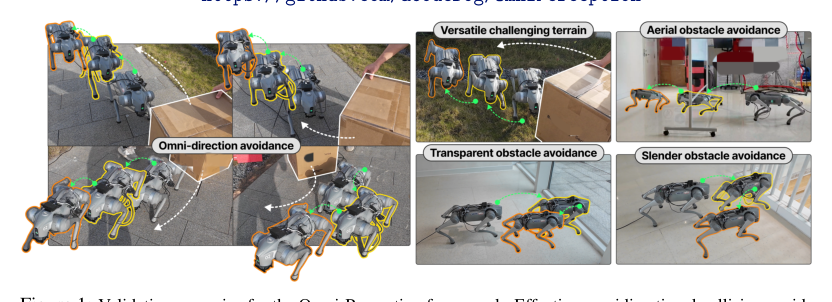
Omni-Perception: Omnidirectional Collision Avoidance of Legged Robots in Dynamic Environments
Oral
Mobile/Legged
Perception
新标签打开 AlphaXiv
AlphaXiv 中文概览(可滚动查看)