CoRL 2025Oral #1
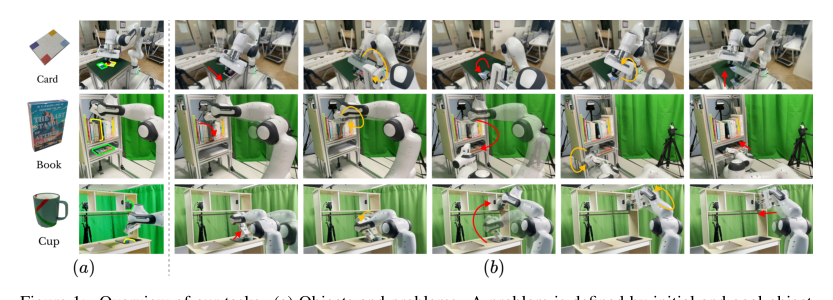
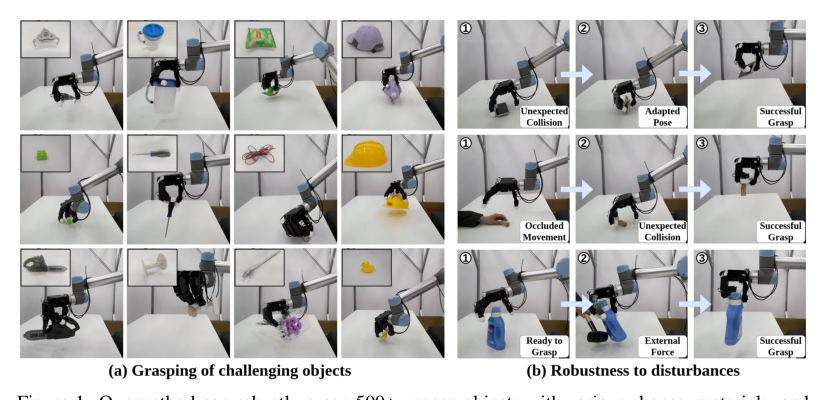
ClutterDexGrasp: A Sim-to-Real System for General Dexterous Grasping in Cluttered Scenes
针对杂乱场景下灵巧抓取因遮挡碰撞难以闭环、且现有方法需大量真实示教的问题,本文提出两阶段教师-学生框架 ClutterDexGrasp。教师策略在仿真中通过 clutter density 课程学习提升难度,以手部与目标及非目标物体的距离表示编码几何空间关系,并引入交互感知安全课程抑制碰撞与过度用力;再通过离线模仿学习将知识蒸馏至基于部分点云的3D扩散学生策略,实现零样本sim-to-real迁移。该系统首次在真实机器人上完成杂乱场景目标导向灵巧抓取的闭环零样本部署,在多样物体与密集布局下均具鲁棒性。