主页
返回索引
CoRL 2025 / Poster #190
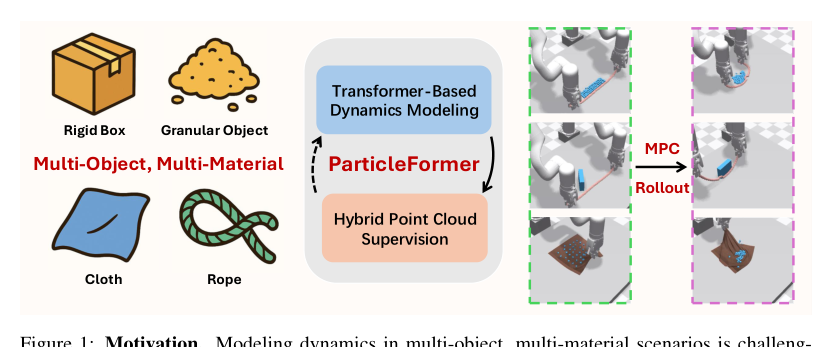
ParticleFormer: A 3D Point Cloud World Model for Multi-Object, Multi-Material Robotic Manipulation
Poster
Manipulation
Planning
Perception
新标签打开 AlphaXiv
AlphaXiv 中文概览(可滚动查看)