主页
← Embodied AI TopConf Index
+
点赞
0
Embodied AI TopConf · ICML2025
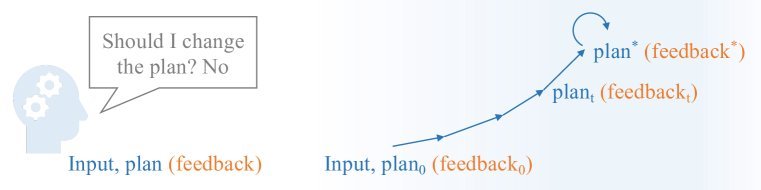
Closed-Loop Long-Horizon Robotic Planning via Equilibrium Sequence Modeling
ICML2025 / Planning and Reasoning
规划/推理
新标签打开 AlphaXiv
新标签打开 Code
AlphaXiv 中文论文页面(可滚动查看)