精读笔记
Problem Setting
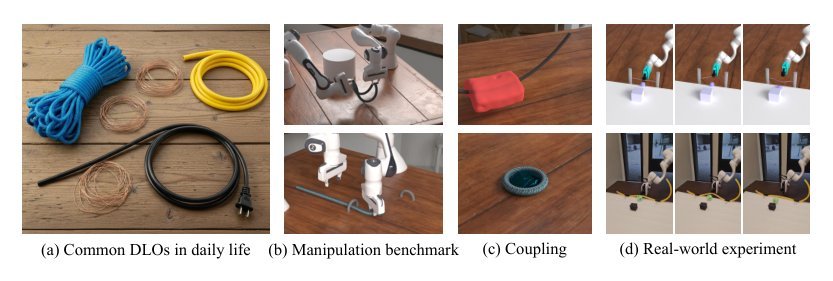
DLO-Lab (ICLR 2026) 针对的是可变形线性物体(DLO,如线缆、绳索、金属丝)机器人操作中“缺乏统一可微仿真与系统评测平台”的问题。真正困难的地方在于DLO的共维(co-dimensional)本质:几何上低维,却要求极高的操作精度;动力学上涉及自接触、打结、塑性残余变形、不可延伸约束等强非线性;交互层面又必须与刚体、软体、流体等跨材料耦合。以前的工作大多是任务专属(解结、穿线、塑形),依赖真实世界数据或手工启发式,难以泛化;而现有模拟器各自只覆盖部分能力——有的支持塑性但无跨材料耦合,有的支持耦合但不可微,有的可微但仅限于简单自碰撞。这导致学习算法无法在一个物理保真且梯度可控的环境中,被公平地评估什么策略真正适用于DLO操作。
Motivation
作者的核心观察是:DLO操作面临的瓶颈不仅是“算法不够强”,更是“底层平台不完整”。如果模拟器无法同时提供(1)丰富的材料与耦合物理,以及(2)端到端的可微性,那么轨迹优化只能退化为黑箱搜索,强化学习则要在低样本效率下盲目探索。已有模拟器(SoftGym、Elastica、C-IPC、DEFORM等)在表1中呈现出明显的能力碎片化:没有一家同时支持耦合(Coupling)与可微(Differentiability)以及塑性/循环拓扑。因此,作者认为必须先补齐平台缺口,才能回答“在DLO任务中,梯度优化、无梯度优化与强化学习到底谁更适用”这一基础问题。
Core Idea
核心思想可以概括为“用经典DER的紧凑几何结构作为强归纳偏置,嫁接现代可微编程框架,并通过DLO的线性拓扑把高层规划压缩到低维标量空间”。具体而言,论文没有从零构建一个通用可微引擎,而是选择Discrete Elastic Rods (DER) 这一本就为共维结构设计的模型,将其嵌入Taichi/Genesis生态,扩展塑性、循环拓扑和跨材料耦合,从而在保证物理正确性的同时获得端到端梯度。更具策略性的设计是:利用DLO的线性本质,将任意抓取点表示为一维坐标s∈[0,1],这使得大模型可以作为高层规划器直接输出结构化子任务与连续抓取点,而不必在三维空间中做昂贵的连续搜索。本质上,这是一套“可微物理提供低层梯度信号,低维拓扑参数化提供高层组合约束”的分层体系。
Method
真正关键的机制只有三个: 1. **扩展DER求解器**:在经典stretching/bending/twisting能量之外,引入弯曲塑性(yield threshold + creep rate)和循环拓扑(通过holonomy angle均摊实现闭合环),让同一套求解器覆盖橡皮筋、金属丝、绳索等异质材料。 2. **双向跨材料耦合与可微接触**:对刚体采用基于SDF的指数软耦合(soft penetration factor),既避免硬穿透导致的梯度爆炸,又维持动量守恒;对软体/流体则借Genesis的MPM求解器,通过Eulerian背景网格实现双向动量传递。针对摩擦自接触,手工定制反向传播kernel(frozen normal + ratio-preserving norm clipping),在物理精度与梯度稳定性之间做必要折中。 3. **基于拓扑参数化的任务分解**:利用DLO的一维结构将抓取点压缩为单个浮点数,通过多模态大模型(Gemini)进行视觉-语言推理,并在每个子任务后基于实际状态重新规划(closed-loop replanning),避免开环累积误差。
Key Insight / Why It Works
方法有效性的根源在于**物理模型与计算框架的高度匹配**:DER对共维结构是极度紧凑且解析可微的描述,相比用通用FEM/MPM直接离散DLO,它用更少自由度捕获了弯曲-扭转耦合,使弹性部分的梯度流天然可控。可微模拟之所以能work,很大程度上是因为Taichi的autodiff接管了主体解析势能的求导,而手工接触kernel只是在“梯度爆炸”处做了局部截断(frozen normal牺牲了接触法向的二阶精确性以换取稳定)。不过,Table 2和正文揭示了一个更深刻的判断:**CMA-ES在多数任务中实际优于梯度下降(GD)**,这说明当前可微接触仍存在“梯度盲区”——当任务涉及绳索通过摩擦驱动外部刚体(Slingshot, Lifting, Gathering)时,初始轨迹中梯度信号根本不存在,GD完全失效。因此,GD的样本效率优势目前仅限于**内禀DLO变形任务**(Wire Art, Wiring)。至于LLM规划部分,其成功并不主要依赖大模型的深度物理推理,而是因为一维抓取点参数化把原本连续的三维机械搜索变成了低维标量选择,显著降低了搜索空间;其“推理”更像是基于预训练常识的启发式初始化。
Relation To Prior Work
本文属于“analytical differentiable simulation”谱系(DiffTaichi、Warp、DiffCloth的延伸),但首次将DER扩展为支持塑性、循环拓扑,并与Genesis的通用物理生态(刚体、MPM、流体)实现双向耦合。与SoftGym相比,后者侧重RL benchmark但缺乏DLO专用模型与可微性;与Elastica相比,后者可微且有塑性但无跨材料耦合;与C-IPC/IMC相比,后者侧重高保真接触但计算开销大且不可微或难以整合进学习框架;与DEFORM等learning-based simulator相比,本文坚持解析物理模型,避免了神经网络模拟器的数据依赖与泛化瓶颈。近期LLM+机器人操作的工作已展示过高层规划,本文的不同之处在于利用DLO的线性几何把抓取点规划转化为可直接执行的标量回归,使大模型输出与物理引擎的动作空间天然对齐。
Dataset / Evaluation
Benchmark设计了9个任务(穿环、绕柱、塑形、弹弓、收集、分离等),确实试图覆盖不同材料参数(刚度、塑性、不可延伸性)和交互模式,且提供了全状态观测与标准化API。然而,这些任务均为单一场景的固定设置,缺乏跨尺寸、跨形状、跨材质的系统性泛化测试。真实世界验证仅在Slingshot任务上做了单臂开环迁移,虽说明sim-to-real gap可控,但远不足以支撑通用DLO操作的宣称。评估结果实际上呈现了一个分裂的结论:在梯度可传递的纯DLO任务中GD效率最高;在涉及刚体间接驱动的任务中GD失效(表中直接标记为–),CMA-ES成为实际最强基线。这说明benchmark本身既验证了可微引擎的潜力,也划定了其当前能力边界。
Limitation
方法成立的前提是优化目标主要依赖DLO自身状态变化,而非通过接触间接驱动外部物体。一旦涉及绳索带动刚体或软体,当前可微接触模型无法提供有效初始梯度,导致梯度优化根本不能启动,这是多体间接交互场景下的根本性脆弱。LLM agent的闭环重规划虽然有效,但其成功依赖于高质量渲染图和明确的任务描述,面对更复杂的乱绳解结或遮挡场景是否可靠,文中未充分说明。Benchmark采用全状态观测和手工稠密奖励,隐含了“状态全知”的不切实际前提;sim-to-real仅验证了单任务开环轨迹,闭环视觉策略的迁移仍是空白。此外,不同任务间是否存在训练数据的隐式重叠、LLM规划是否只是对训练任务的模式匹配,亦缺乏深入分析。
Takeaway
- 1. 对共维可变形体,专用解析模型(DER)+可微引擎仍优于通用神经网络模拟器,但当前瓶颈已从“能不能模拟”转向“接触梯度能不能稳定穿过多体交互”。
- 未来更值得投入的是隐式接触模型的可微化,而非简单增加材料种类。
- 2. DLO的一维拓扑参数化(s∈[0,1])是一个极强的领域归纳偏置,可显著压缩高层规划的动作空间;这一思想可迁移到其他具有低维本征参数化的操作问题(如薄膜的二维参数化、关节链的角度空间)。
- 3. 在现有可微接触不完美的情况下,高度并行化的无梯度方法(CMA-ES)在GPU模拟环境中展现出极强的实际竞争力,在评估新算法时不应被忽视为baseline。
一句话总结
DLO-Lab通过将经典DER扩展为支持塑性、循环拓扑与跨材料耦合的可微物理引擎,并配套一套benchmark揭示了:在DLO内禀变形任务中梯度优化具有样本效率优势,但在复杂多体接触驱动场景下可微性仍易断裂,实际最强基线仍是高度并行的进化策略。