主页
← Embodied AI TopConf Index
+
点赞
0
Embodied AI TopConf · ICLR2026
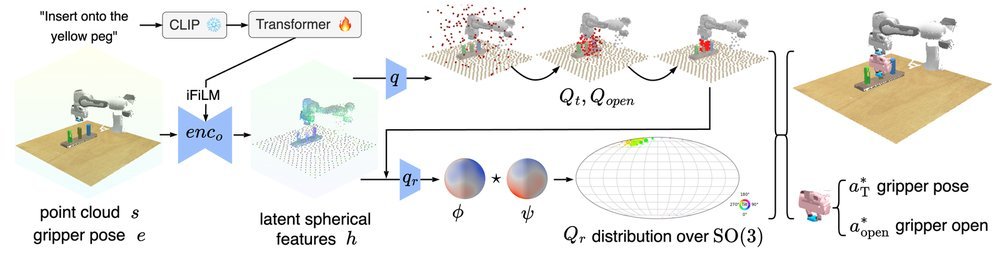
EquAct: An SE(3)-Equivariant Multi-Task Transformer for 3D Robotic Manipulation
ICLR2026 / Policy
三维视觉
策略学习
新标签打开 AlphaXiv
AlphaXiv 中文论文页面(可滚动查看)