精读笔记
Problem Setting
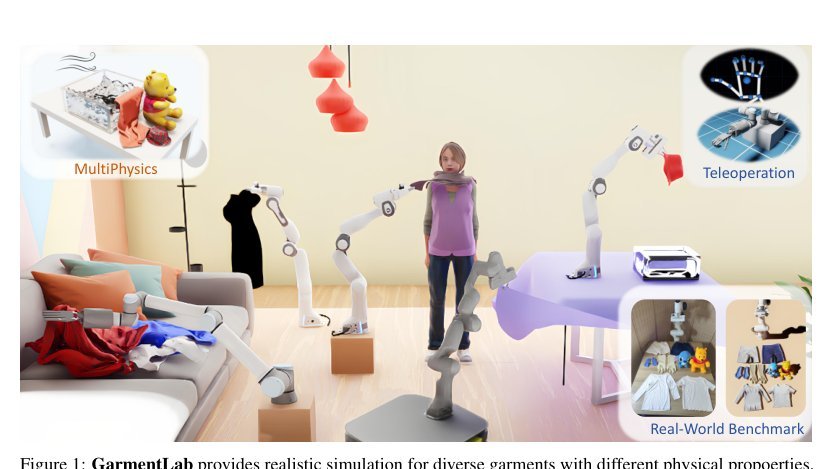
服装与可变形物体操作是家庭辅助机器人的核心能力,但其状态空间无限、物理动态复杂、且涉及多介质交互(服装-流体-刚体-人),导致学习算法极难训练与评估。现有基准要么仅支持单一物理仿真(如SoftGym只用PBD),要么缺乏机器人集成与真实世界复现 pipeline,使得研究被迫在过度简化的设定中进行,无法触及真实场景中的长程任务与跨域泛化问题。关键矛盾在于:算法需要大规模交互数据,但真实世界收集成本过高;而现有仿真平台在物理多样性、渲染真实感和真机部署支持上同时不足,形成了“仿真不够真、任务不够全、部署不够近”的三重瓶颈。
Motivation
作者的核心观察是:现有服装操作研究被“碎片化”的仿真基础设施所限制——PBD仿真器只能做服装,流体仿真器只能做流体,刚体仿真器缺乏高保真可变形支持,且鲜有平台同时提供GPU并行、真实感渲染、ROS接口与真实世界基准。此外,已有sim2real工作多聚焦于刚体,对可变形物体的视觉sim2real gap(皱褶、厚度、分布偏移)缺乏针对性方案。因此,领域缺的不是某个新算法,而是一个能统一多物理场、支撑现代学习范式(RL/模仿学习/视觉对应)、并具备真实世界验证通道的完整生态系统。GarmentLab的动机正是用工程整合的方式填补这一基础设施鸿沟,从而暴露当前算法的真实瓶颈。
Core Idea
论文的核心思想是构建一个“全栈统一”的可变形物体操作研究平台,而非提出单一算法。其本质是将 previously isolated 的多物理场求解器(PBD for cloth/fluid, FEM for elastic bodies, PhysX for rigid/articulated systems)嵌入到现代GPU图形引擎(Omniverse Isaac Sim)中,使得服装、流体、刚体、人形 avatar 和多种机器人可在同一仿真空间内交互。与prior的本质区别在于:GarmentLab不追求某个单一物理量的极致精确,而是通过物理覆盖度、渲染真实性和真机接口的联合设计,把“仿真-训练-对齐-部署”闭环打通。它引入的inductive bias是:服装操作智能必须在与多介质交互的长程任务中被评估,而非孤立地测试折叠或展开。平台通过强制算法面对高维视觉输入、复杂接触动力学和真实运动学约束,倒逼表征学习与策略搜索的协同进化。
Method
关键机制集中在三个层面。第一,多物理场统一仿真层:在同一个GPU环境中并行运行PBD(大服装与流体)、FEM(小弹性物体如手套袜子)和PhysX刚体/铰接/机器人求解器。必要性在于单一求解器无法同时处理洗衣服(服装+流体)、打包(服装+FEM物体)等跨介质任务;它带来的核心变化是任务定义空间从“单物体操作”扩展到“多物理场交互”。第二,自动化视觉sim2real对齐:通过点云仿射对齐(Chamfer距离优化)、深度图加噪(salt-and-pepper + Gaussian)以及关键点嵌入对比学习(InfoNCE)三项技术,将仿真中学到的dense visual correspondence迁移到真实世界。必要性在于服装的几何细节(皱褶、悬挂形态)对点云分布极度敏感;核心变化是将域迁移问题从“端到端重训练”转化为“表征空间对齐”。第三,真实世界基准与运动集成:通过商业扫描构建真实服装数字资产,并集成ROS/MoveIt与Leap Motion遥操作,将真实运动学先验注入仿真。必要性在于缩小动作层面的sim2real gap;核心变化是让仿真中的策略在训练阶段就暴露于真实世界的运动约束。
Key Insight / Why It Works
平台有效暴露算法瓶颈的原因在于“物理多样性+感知挑战性+部署真实性”的三重叠加,而非某项单一技术的突破。其中,视觉sim2real对齐能work的核心是服装操作极度依赖3D几何对应关系:通过显式对齐仿真与真实点云分布(仿射变换)并在训练时破坏仿真数据的“过度干净”(加噪),模型被迫学习对传感器噪声和视角变化鲁棒的表征,而非记忆仿真特有的纹理/光照伪影。不过,文中定量证据偏弱(真实实验仅15次/任务),其增益可能部分来自小规模实验的variance,而非方法本身的系统性优势。GPU并行仿真带来效率提升,但这本质上是Isaac Sim的工程红利,属于scaling范畴。真正值得关注的insight来自实验诊断:视觉对应方法(UGM)在大件服装上显著优于RL,而RL在长程任务中因异常轨迹和credit assignment问题几乎失效——这说明当前阶段可变形物体操作的核心瓶颈不在数据量,而在策略结构的长期推理能力与接触动力学建模。GarmentLab的价值恰恰是提供了一个让这类诊断得以系统化的环境。
Relation To Prior Work
与SoftGym(PBD-only, CPU/GPU Flex, 任务单一)和FluidLab(Taichi, 仅流体)相比,GarmentLab的本质差异是“物理覆盖度”与“机器人系统集成度”:它不是改进某个特定物理仿真,而是将多求解器置于现代机器人仿真栈(Isaac Sim/PhysX5)之上,并补齐了ROS、MoveIt和真机扫描基准。与SAPIEN、ManiSkill2等刚体/铰接物体平台形成互补——这些平台缺乏可变形物体支持,而GarmentLab填补了这一块,同时保留了它们的刚体能力。与UniGarmentManip、ClothFunnels等算法工作相比,GarmentLab是下游基础设施:值得注意的是,UGM在GarmentLab上的表现弱于原始PyFlex环境,说明引入真实机器人运动学和场景碰撞后,任务难度陡增, prior的简化假设不再成立。技术谱系上,它属于“仿真基础设施驱动型”研究,类似于Isaac Gym对刚体RL的推动,但目标域转向了可变形+多物理场。
Dataset / Evaluation
Benchmark包含20个任务、5大交互类别(服装自交互、服装-流体、服装-FEM、服装-刚体、服装-人),覆盖11类服装与多种机器人形态(固定臂、移动臂、吸盘、灵巧手、ShadowHand)。具备真实世界组件:20个经激光扫描+人工后处理的真实物体,以及配套的协议化任务定义。然而,实验设计存在明显局限:真实世界测试仅覆盖T恤折叠与帽子悬挂,且样本量极小(各15次);RL算法因“安全风险”完全未在真实世界验证,导致平台对RL的sim2real claim仅停留在仿真层面。此外,视觉算法的仿真评估使用particle-to-particle distance等需要ground-truth mesh的指标,这在真实世界几乎不可复现,文中未说明真实实验是否采用同等严格的自动化评估,还是依赖人工判断,存在evaluation bias风险。总体上,benchmark成功验证了“当前算法在复杂/长程任务上普遍失败”的claim,但未能充分支撑其sim2real方法“显著缩小差距”的强宣称。
Limitation
平台能力高度绑定NVIDIA Omniverse生态,其多求解器耦合机制(如PBD流体与PBD服装的交互)在文中缺乏深度技术披露,长期动态稳定性与物理正确性存疑。所谓泛化能力主要依赖ClothesNet等资产库的mesh多样性,但算法可能隐式利用mesh结构先验(如T恤与夹克共享的拓扑骨架),跨拓扑类别的泛化(如从上衣到裤子)未得到严格测试。Sim2real视觉对齐虽标榜“自动化”,但关键点获取需要人工贴marker与self-play,落地成本被低估;且其本质是将仿真分布手工拉扯向真实,并未解决仿真物理本身的不真实。RL在长程任务中的失败被归因于任务难度,但文中选用的是vanilla PPO,未尝试hierarchical RL或model-based方法,因此“RL不适合服装操作”的结论过于草率。真实世界基准的扫描与标注流程(商业设备+人工补洞+关键点标注)成本高昂,难以像YCB那样被广泛复现,与其“internationally reproducible”的宣称存在张力。
Takeaway
- 1. 可变形物体操作的近期突破点不在端到端RL,而在“视觉表征学习+仿真数据多样性+结构化策略(primitives/hierarchy)”的组合;GarmentLab的实验表明,dense correspondence类方法比RL更具备当下scalability。
- 2. 机器人学习已进入“全栈物理仿真”阶段,单一求解器benchmark的边际价值递减,未来应更多投资于多物理场耦合与真实感渲染的系统性整合,而非孤立优化某个物理量。
- 3. 该工作暴露了一个被忽视的蓝海:流体-服装交互(洗涤、风干)在prior中几乎空白,值得开发新的操作原语与物理可微仿真。
- 4. 最应警惕的方向:单纯堆砌仿真并行度或资产数量无法自动解决长程推理问题,领域需要新的状态抽象与接触动力学模型,而非更多数据工程。
一句话总结
GarmentLab通过统一多物理场GPU仿真、真实感渲染与ROS/真机集成,将服装操作研究从单一任务的简化仿真推进到多介质交互的系统评估时代,其核心价值在于作为基础设施暴露了当前算法在复杂长程任务与跨域泛化上的根本局限,而非提出新的学习算法。