精读笔记
Problem Setting
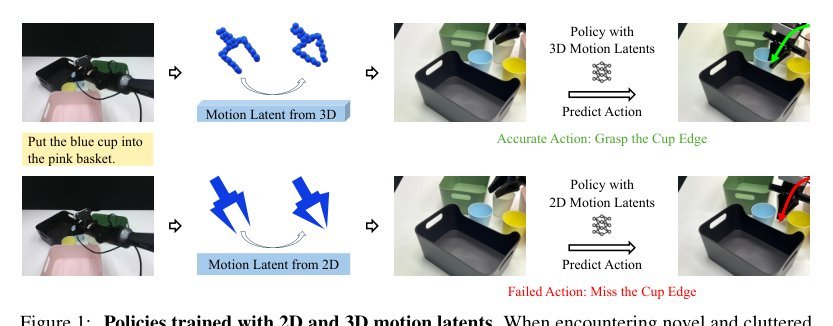
论文实际解决的是操作策略学习中运动隐变量的'几何盲'问题:现有方法从2D图像序列学习运动模式,导致隐变量空间编码的是像素关联而非物理变换。真正困难在于如何在不依赖多视角重建的前提下,从单视角RGB-D中联合建模3D空间几何与时间动态(即4D)。以前方法卡在两个极端——要么冻结3D场景做静态推理(Act3D, 3D Diffuser Actor),要么在2D视频空间做无深度的时间建模(LAPA, Moto)——无法同时捕获空间结构与动态演化。关键矛盾在于:操作本质上是4D物理过程,但表示学习的目标函数大多定义在2D像素或静态3D空间。
Motivation
作者的核心观察是:操作成功由3D几何变换决定(抓取依赖空间关系、接近角、遮挡推理),而非视觉外观。2D视频预测可能学到与物理运动相关的表面线索,但这些线索是间接且视角相关的;静态3D方法虽然有了深度,却将动作生成视为从冻结场景中的单步回归,忽略了操作是连续几何变形过程。关键缺口在于缺乏一种自监督目标,能直接将运动隐变量的学习与'预测动作导致的3D物理后果'绑定,从而过滤掉外观噪声,提取可跨场景转移的运动基元。
Core Idea
核心思想是将运动隐变量的学习从'视觉重建/生成'重新定义为'未来3D几何状态预测'。直觉上,物理运动必然表现为3D点云的刚性或非刚性变换;因此,预测未来点云演化是对'运动语义'的最强约束,比预测像素变化更直接、更剔除外观干扰。本质区别在于: prior 方法问的是'下一帧图像长什么样',GeoMoLa问的是'点云如何动'。这引入了一个新的归纳偏置——有效的操作运动必须对应可预测的几何变换。信息流也被重组:先通过4D几何预测提炼出离散、可复用的运动基元,再将这些几何一致的高层基元注入低层扩散策略,实现了视觉-语言理解与几何运动推理的解耦。
Method
方法的关键机制集中在三个层面:(1)自监督目标的重设计。使用条件扩散模型预测未来pointmap序列,这解决了'如何从原始演示中提取运动语义'的问题——答案是迫使模型承担物理后果预测任务,而非观测重建。(2)离散化与聚类。VQ-VAE将几何运动模式压缩为离散码本,这解决了运动基元的可复用性和组合性问题,相似的几何演化被强制聚类到同一码字。(3)3D几何空间中的策略生成。动作扩散模型以运动隐变量为跨注意力条件,场景token通过深度反投影lift到3D空间并配备3D旋转位置编码,这解决了策略必须在几何空间而非图像空间中进行注意力计算和轨迹去噪的问题。
Key Insight / Why It Works
方法真正有效的原因是自监督目标的结构性改变:预测未来几何状态是比预测像素或重建观测更强的表示约束,它强制隐变量必须编码动作-几何因果链,而非记忆视觉纹理。消融实验的不对称性(移除几何预测大幅下降,移除RGB预测几乎无损)证明核心能力来自4D几何归纳偏置,而非数据量或模型规模的简单scaling。这意味着 GeoMoLa 本质上是通过更好的表示学习目标(latent structure + better inductive bias)获得了泛化性。不过,文中未充分论证离散隐变量相比连续隐变量的必要性;且真实世界实验规模较小,鲁棒性结论可能受限于演示覆盖范围。
Relation To Prior Work
与2D运动隐变量路线(LAPA, Moto, SkillDiffuser)的本质差异在于:GeoMoLa将运动latent的'定义域'从图像空间搬到了4D几何空间,运动基元由物理变换定义而非像素模式。与3D操作策略(Act3D, 3D Diffuser Actor, RVT2)的差异在于:这些方法使用静态3D表示进行动作回归,而GeoMoLa显式建模了动态——它学习的是状态转换中的运动基元。与ManiGaussian等4D动态方法相比,GeoMoLa放弃了昂贵的多视角高斯溅射重建,改用轻量的单视角pointmap预测,且最终目标是为控制服务而非场景重建。整体属于'几何结构化的运动抽象 + 扩散策略'谱系,真正新增的是将未来预测作为几何运动隐变量的自监督预训练目标。
Dataset / Evaluation
实验覆盖单任务多变化(RLBench 10任务)、长程任务链零样本泛化(CALVIN ABC→D)和真实世界(ALOHA 6任务)。RLBench验证了单视角SOTA;CALVIN的长程链式指标(平均完成长度)较好地支持了'显式4D动态减少复合误差'的claim,因为增益随序列长度扩大;真实世界部分验证了杂乱场景和少量演示下的鲁棒性。但evaluation存在明显局限:RLBench使用BiRRT规划器执行关键姿态,弱化了轨迹生成难度;真实世界任务数量少,且未与大规模预训练策略(RT-X, Octo)对比,主要比较的是同量级3D/2D基线;跨场景泛化测试的变化维度(颜色、位置)相对温和,对未训练物体类别的验证不足。
Limitation
方法成立的前提是深度图足够准确以支撑pointmap反投影,且物体近似刚性,这对透明/反光/可变形体不成立。VQ-VAE码本规模固定为64,是否会成为复杂长程操作的表达瓶颈文中未讨论。所展示的泛化主要在分布内变化(颜色、位置),对全新物体拓扑的组合泛化能力未知。RLBench的成功部分得益于关键姿态+运动规划的解耦评估,可能高估了策略的轨迹生成能力。真实世界每任务仅20条演示,成功率绝对值仍偏低(53.3%平均),其鲁棒性结论需谨慎对待。此外,运动隐变量本质上是演示数据中的常见几何模式聚类,在显著偏离演示拓扑的新场景中可能退化为高级检索而非真正推理。
Takeaway
- (1)这篇论文提供了一个强有力的方向性证据:在机器人操作中,4D几何预测是比2D视频预测更本质的自监督预训练目标,未来表示学习应更多关注'物理后果'而非'视觉重建'。
- (2)可迁移的insight是:对于任何需要从演示学习可复用技能的问题,将隐变量锚定在'状态变换预测'上,可能是提升样本效率和物理一致性的通用原则。
- (3)未来真正值得做的是:将这些几何运动基元与在线RL结合,突破演示分布限制;扩展到可变形体/流体,验证4D几何预测的普适性;以及研究层级规划,将离散几何基元作为高层动作词汇表进行组合推理。
一句话总结
GeoMoLa通过将运动隐变量的自监督学习目标从视觉重建重新定义为未来3D点云演化预测,在单视角操作setting下验证了4D几何感知是比2D视觉感知更本质的操作表示,属于将几何结构注入运动抽象的范式演进。