主页
← Embodied AI TopConf Index
+
点赞
0
Embodied AI TopConf · CVPR2026
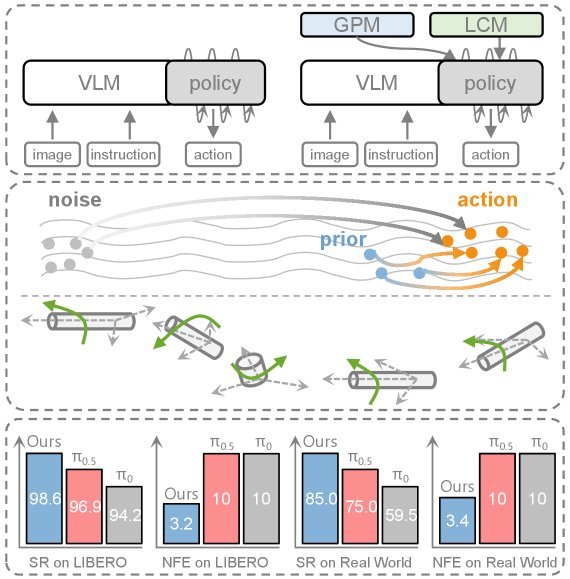
OptimusVLA: Global Prior Meets Local Consistency: Dual-Memory Augmented Vision-Language-Action Model for Efficient Robotic Manipulation
CVPR2026 / Vision-Language-Action Models
视觉语言动作
感知
加速/部署
新标签打开 AlphaXiv
新标签打开 Code
AlphaXiv 中文论文页面(可滚动查看)