主页
← Embodied AI TopConf Index
+
点赞
0
Embodied AI TopConf · NeuIPS2025
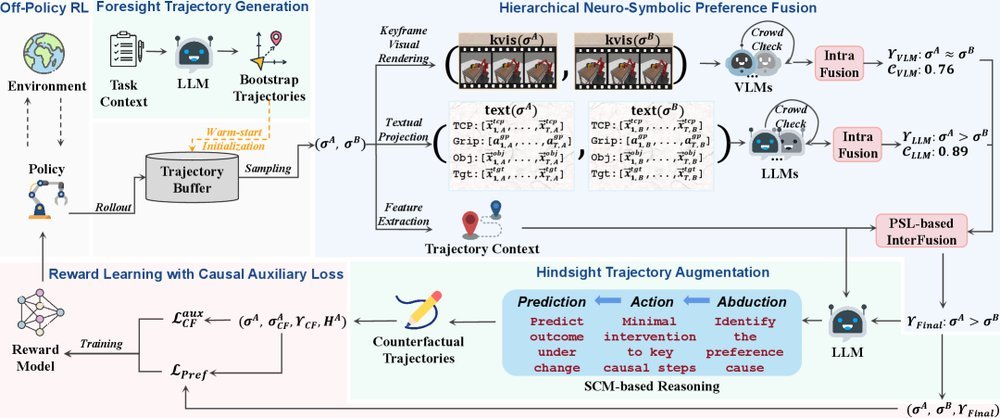
PRIMT: Preference-based Reinforcement Learning with Multimodal Feedback and Trajectory Synthesis from Foundation Models
NeuIPS2025 / Vision-Language-Action Model
视觉语言动作
策略学习
触觉
感知
新标签打开 AlphaXiv
AlphaXiv 中文论文页面(可滚动查看)