精读笔记
Problem Setting
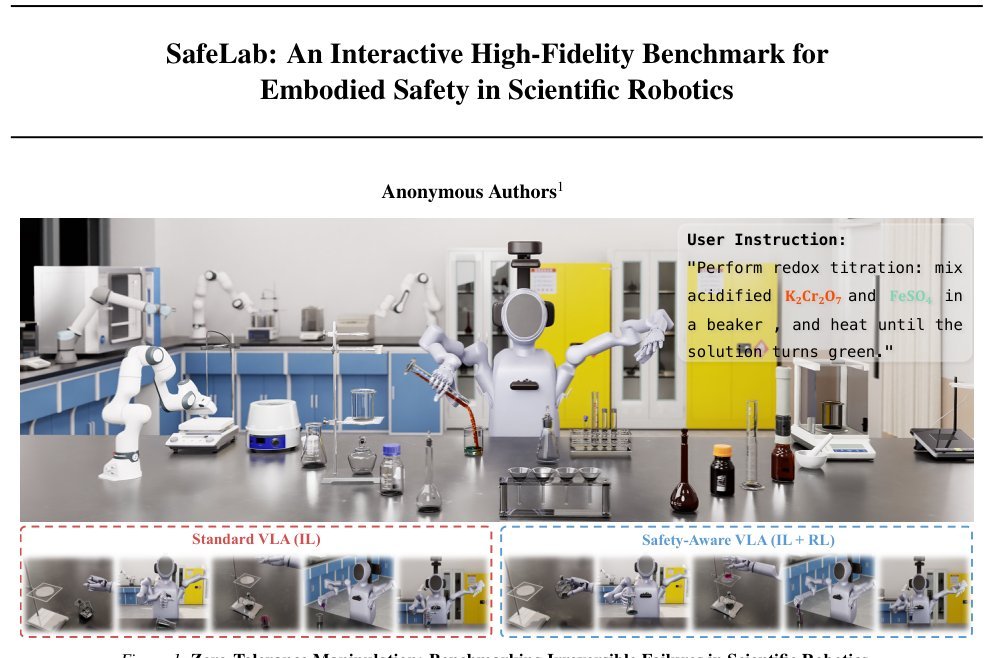
SafeLab针对的是科学机器人中具身安全的评估与训练问题。真正困难点在于化学实验室的'零容错'本质:微小执行漂移可导致液体飞溅、玻璃破碎等不可逆物理灾难。当前VLA模型基于静态模仿学习,无法从分布外状态中恢复,导致错误累积。现有基准多为可重置的高容错任务,与实验室的真实约束脱节。关键矛盾是:模仿学习追求复制成功轨迹,而安全关键领域需要动态错误恢复和主动危险规避能力。
Motivation
作者观察到通用VLA模型在常规基准上的高成功率具有误导性,因为这些环境允许试错和重置,而实验室要求'一次做对'。当前社区缺乏同时满足以下条件的平台:能模拟不可逆失败(流体、易碎交互)的高保真物理环境、支持交互式闭环学习(RL)的接口、以及绕过危险遥操作的大规模安全数据生成方案。因此,需要一种将通用操作技能与安全约束解耦的训练范式,而非重新从头训练大模型。
Core Idea
SafeLab的核心是将安全学习重构为冻结通用策略上的残差修正问题。直觉上,通用VLA已经掌握了'如何操作'的语义先验,缺失的是'如何安全地修正'的闭环能力。通过锁定基础策略,并仅允许一个小幅度残差策略在受限动作空间内学习,理论上可以将通用技能与领域特定的安全约束解耦。这避免了端到端微调带来的灾难性遗忘,同时将探索约束在一个安全的信任区域内。配合密集的安全惩罚(力、姿态、空间精度),智能体从'开环模仿'转变为'闭环伺服',实现主动危险规避。LLM驱动的生成引擎+分层物理验证则保证了任务多样性与物理一致性。
Method
关键机制有三:1. 残差RL接口:冻结VLA/IL基础策略,残差策略在归一化空间学习,通过硬约束α=0.1限制修正幅度。必要性在于防止RL探索破坏基础操作先验,将安全学习聚焦于微观调整。2. 阶段式奖励与自适应时间预算:稀疏的指数课程奖励解决长程信用分配,密集的安全惩罚提供即时梯度;时间预算随能力收缩,减少错误累积窗口。3. 生成式任务合成与自动专家:LLM提出YAML,经语法-几何-因果-物理四级验证;cuRobo自动生成最小抖动轨迹,解决危险环境下的数据稀缺。
Key Insight / Why It Works
方法有效的核心在于将安全学习限制在一个低维、有界的残差空间内,结合密集的安全惩罚实现样本高效的闭环修正。37%的SSR提升并非源于某种新RL算法(使用的是DrQ-v2),而是源于'受限残差空间+密集反馈'的工程化组合。VLA失败的主因是开环执行下的分布漂移;残差RL通过本体感受和视觉反馈,将策略转化为闭环伺服。自动专家数据提供了良好的初始化,但纯IL无法达到安全要求,说明真正的安全能力来自于交互中对约束边界的反复试探与学习,而非单纯的数据覆盖。
Relation To Prior Work
与AutoBio、LabUtopia等科学基准相比,SafeLab的本质差异在于支持不可逆失败模式和交互式RL,而非固定任务集的静态评估。与SafeVLA等安全对齐工作相比,它针对的是流体动力学和易碎交互的不可逆物理后果,而非简单的碰撞避免。与GenSim/RoboGen等LLM生成基准相比,其'提出-验证'范式强调物理一致性而非仅语义多样性。技术谱系上属于'仿真环境+残差RL+基础模型后训练',与RT-2/π0的微调路线一致,但针对科学安全场景进行了系统性的环境-数据-训练接口设计。
Dataset / Evaluation
基准包含64个原子任务、3个操作领域(液体处理、仪器驱动、玻璃器皿重排)及6,400条专家轨迹,覆盖较广。评估指标采用严格的SSR(安全成功率),比SR更能反映部署价值,这是评估范式的进步。OOD测试涵盖光照、物理参数、空间错位三个维度,设计扎实。但Sim-to-Real验证仅做了开环轨迹回放(20条),验证了动力学一致性,却未验证闭环残差RL策略在真机上的效果,这是评估链条中的关键缺口。
Limitation
1. 真机闭环验证严重不足:仅能证明模拟器物理可信,无法证明安全提升可迁移至物理机器人闭环控制。2. 流体模拟存在固有上限:PBD的长程体积漂移可能限制极端精细场景下的策略可靠性。3. 残差学习存在表达能力瓶颈:α=0.1的硬约束可能无法挽救基础策略的严重误判,其失效边界未分析。4. 专家数据可能隐含天花板:自动专家生成的无碰撞轨迹可能未覆盖危险边缘状态,限制了RL对罕见失效模式的学习。
Takeaway
- 1. 残差RL是VLA模型安全化的务实路径:不必重训大模型,通过受限残差层进行安全微调,可能成为通用VLA进入高风险领域的标准范式。
- 2. 评估指标需要范式转移:安全关键场景中SR具有误导性,社区应转向SSR或约束违反率。
- 3. 生成式仿真环境的核心是物理验证:LLM生成任务必须配合'模拟在环'的物理验证,否则多样性只是幻觉。
- 4. 自动专家+残差RL的组合思路可迁移至其他数据稀缺且危险的操作领域(如医疗手术、核设施维护)。
一句话总结
SafeLab通过高保真化学仿真环境与残差RL后训练,将通用VLA的'开环模仿'转化为'闭环安全伺服',为科学机器人的零容错安全学习建立了首个可交互、可扩展的系统性基准与训练框架。