主页
← Embodied AI TopConf Index
+
点赞
0
Embodied AI TopConf · ICCV2025
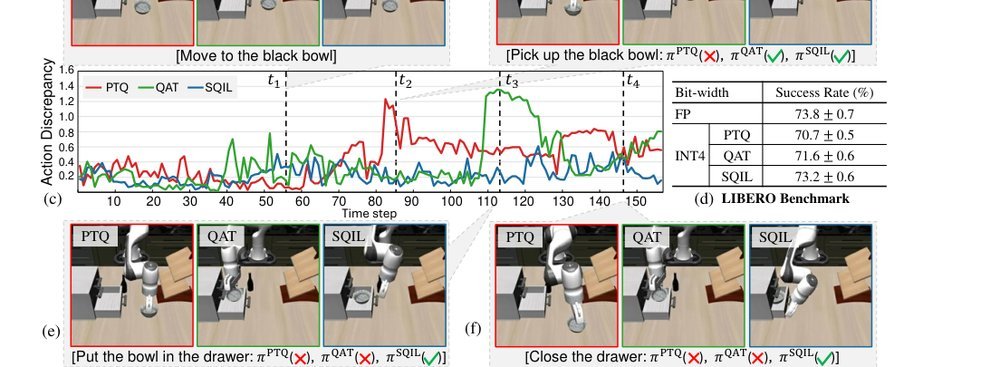
Saliency-Aware Quantized Imitation Learning for Efficient Robotic Control
ICCV2025 / Accelerating and Deploying
策略学习
加速/部署
新标签打开 AlphaXiv
AlphaXiv 中文论文页面(可滚动查看)