精读笔记
Problem Setting
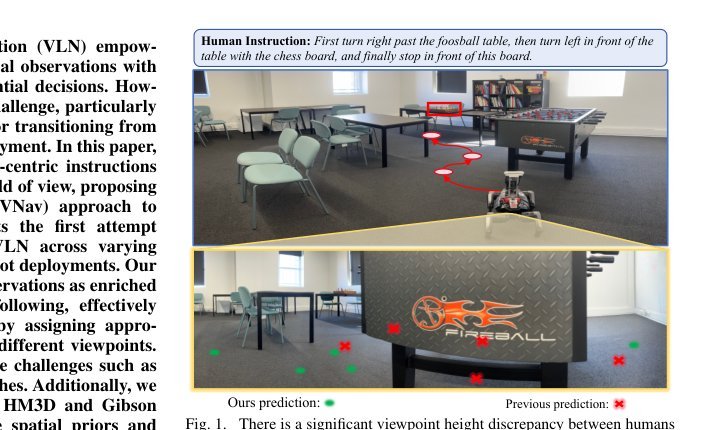
这篇论文实际解决的是连续环境VLN向真实低身高机器人(如30cm级四足机器狗)部署时的视角高度域差距问题。核心困难不是语言理解失败,而是人类标注指令时的高视角(~1.7m全景)与机器人执行时的地面低视角(~0.3m)之间的感知不对称:地标外观剧变、局部严重遮挡、深度/可通行性估计失效。以前的方法要么在离散高视角图上训练,要么直接在低视角数据上重训,但性能仍暴跌(如ETPNav掉36% SR),且未有人系统量化过‘身高差异’本身作为独立域差距的影响。
Motivation
已有Sim-to-Real路线主要关注单目vs全景的传感器差异,却忽视了‘视角高度’这一更基本的物理变量。作者发现,即使在低视角数据上重新训练现有模型,性能仍远不及高视角设定,说明低视角带来的信息缺失(遮挡、视野截断)无法通过简单重训练弥补。进一步消融显示(Table II),在连续环境下waypoint predictor才是瓶颈:单独重训WP可将SR从21%提到39%,而单独重训navigator仅到32%。另一方面,机器人在移动轨迹上的历史位置往往包含对当前目标区域的无遮挡观测,但现有拓扑方法(如ETPNav)对ghost node做静态平均或累积,未能利用这些互补视角。因此,关键缺口在于:低视角waypoint预测的数据稀缺,以及拓扑记忆缺乏时序多视角的自适应聚合。
Core Idea
将低视角VLN重新建模为‘部分可观测环境下的时序特征补全’问题,而非单纯的domain adaptation。核心假设是:ghost node(未确认的可通行节点)的几何/语义表示不应由当前遮挡视角决定,而应由历史多视角动态加权生成。通过一个可学习的transformer encoder层在所有曾观测到该节点的视角特征上做self-attention,自适应地选择最无遮挡、最相关的历史特征。与此同时,通过跨数据集(HM3D+Gibson+MP3D)将低视角waypoint预测训练数据扩展22倍,先把感知前端的下限拉高。与prior的本质区别在于:先前方法把ghost node当作静态路标,GVNav将其视为可由历史观测动态修正的假设节点,引入了‘时序多视角一致性’作为新的inductive bias。
Method
1. **低视角waypoint预测器的大规模数据扩展**:渲染高度降至0.8m/0.3m,利用HM3D、Gibson、MP3D的连通图构建21万训练样本(×22),直接解决低视角下waypoint predictor的泛化崩溃。核心变化:让predictor见过足够多样的低视角几何分布,而非在R2R小数据上过拟合高视角先验。2. **Multi-view Information Gathering**:在拓扑图更新ghost node时,放弃简单特征平均,将所有历史观测该节点的视角特征送入轻量transformer encoder,通过self-attention计算各视角对当前导航上下文的重要性权重,加权求和得到节点表示。核心变化:将时序记忆显式注入空间拓扑,补偿当前局部遮挡。3. **真机全景采集补偿**:在Xiaomi Cyberdog上加装可旋转RGBD相机(12个30°增量)生成类全景输入。这实际上是以工程手段缓解了低视角单目视野受限的问题,使现有全景VLN框架得以继承。
Key Insight / Why It Works
增益的核心来源是**数据Scaling + 低视角几何覆盖**。Table II的消融显示,仅重新训练waypoint predictor(frozen navigator)就能带来SR从21%到39%的巨大提升,而重新训练navigator只到32%。这说明在低视角条件下,导航策略本身不是瓶颈,**感知前端(可行走路径在哪里)才是**。22倍数据扩展直接缓解了waypoint predictor的泛化不足。Multi-view gathering的作用是**特征层面的遮挡补偿**:当机器狗贴近地面时,历史视角可能提供更全局的几何线索,transformer学的权重本质上是在做‘哪个历史视角最能代表当前ghost node真实可通行性’的选择。但该模块的独立增益在文中未充分量化(缺乏仅替换aggregation方式的严格消融),其收益可能部分被大数据训练覆盖。真实世界的成功很大程度上依赖于**旋转电机生成的类全景输入**,如果没有这个装置,纯单目低视角的性能仍未知。因此这不是纯算法胜利,而是**系统工程(硬件补偿+数据扩展+特征聚合)**的胜利。
Relation To Prior Work
与ETPNav/ScaleVLN最直接相关:GVNav完全继承ETPNav的拓扑规划框架和ScaleVLN的跨数据集连通图构建思想。真正的新增不是导航策略,而是将这套框架**适配到低视角机器人形态学**上。与Navid、Wang et al.等Sim-to-Real工作相比,那些方法关注单目到全景或端到端VLM迁移,但**忽视了视角高度这一维度的域差距**;GVNav首次量化了高度差异对VLN性能的影响。与BEVBert/GridMM等空间记忆方法相比,GVNav指出依赖深度的BEV表示在低视角下尤其脆弱(SR掉32%)。技术谱系上属于**层级化VLN-CE(Hierarchical Waypoint-based VLN)**,但在感知层引入了时序多视角聚合,相当于把SLAM中的多视角几何先验注入到VLN拓扑记忆。
Dataset / Evaluation
模拟实验基于Habitat+MP3D/R2R-CE,有效证明了‘高度域差距’的存在和严重性:通过在同一模型上对比高/低视角测试,清晰地隔离了高度变量。真实世界实验在Xiaomi Cyberdog的4个室内场景(gaming room, kitchen, lab, office)共100条指令上验证了可行性。然而,真实世界评估规模过小,环境复杂度有限,且使用了电机旋转采集全景,与‘标准单目机器人’假设有偏差;缺少对multi-view gathering模块的独立消融(例如与average pooling对比);未在标准unseen benchmark(如R2R-CE val unseen)上与SOTA做全面指标对比,主要聚焦在视角迁移分析。简言之,evaluation**有效验证了‘高度差距’和‘系统可行性’,但未充分验证‘自适应聚合机制’本身的必要性**。
Limitation
1. **方法严重依赖可旋转电机生成类全景输入**,这与论文声称的‘解决单目受限’存在张力——实际上是把低视角单目问题部分转化为了全景感知问题,真机部署成本和平凡性受限。2. **增益主要来自数据scaling**,multi-view adaptive weighting的独立增益未充分量化,可能并不比简单的时序平均/最大池化带来质变。3. **真实世界评估规模过小**(4个房间,100条指令),且环境相对简单,无法证明在复杂长走廊或多楼层中的泛化性。4. **Planner未做实质改进**,完全继承ETPNav的拓扑规划,所谓提升实质是‘感知增强+记忆聚合’,决策推理能力没有进化。5. **数据扩展的可扩展性受限**:0.3m/0.8m是针对特定机器狗的渲染参数,换用其他身高或形态的机器人需重新构建数据集。
Takeaway
- 1. **形态学感知差距(embodiment gap)是sim-to-real的核心瓶颈之一**,未来VLN研究必须将机器人身高、摄像头位姿作为与语言对齐的显式变量,而非假设统一的人类视角。
- 2. **在层级化导航中,感知前端(waypoint/affordance预测)的数据覆盖比导航策略的复杂架构更重要**;当环境感知出错时,再强的planner也无法补救,这条经验适用于大多数embodied AI任务。
- 3. **历史观测的自适应聚合是处理低视角遮挡的有效inductive bias**,可迁移到其他受限感知场景(如自动驾驶鱼眼摄像头、微型无人机等),但需配合更轻量的在线机制,避免依赖全景旋转装置。
- 4. **真正值得推进的方向**:不依赖旋转全景输入的纯单目低视角VLN;将VLM/Foundation Model与低视角几何先验结合,利用互联网预知识补偿地面视角的语义理解;构建大规模多身高VLN数据集。
一句话总结
GVNav通过揭示并量化VLN中‘人类-机器人视角高度域差距’,以跨数据集低视角waypoint预测器扩展和拓扑图历史观测自适应聚合为核心,首次系统性地将层级化VLN-CE框架适配到真实低身高四足机器人上,本质上是一篇以数据覆盖和工程补偿为驱动力的感知增强型sim-to-real工作。