主页
← Embodied AI TopConf Index
+
点赞
0
Embodied AI TopConf · RSS2025
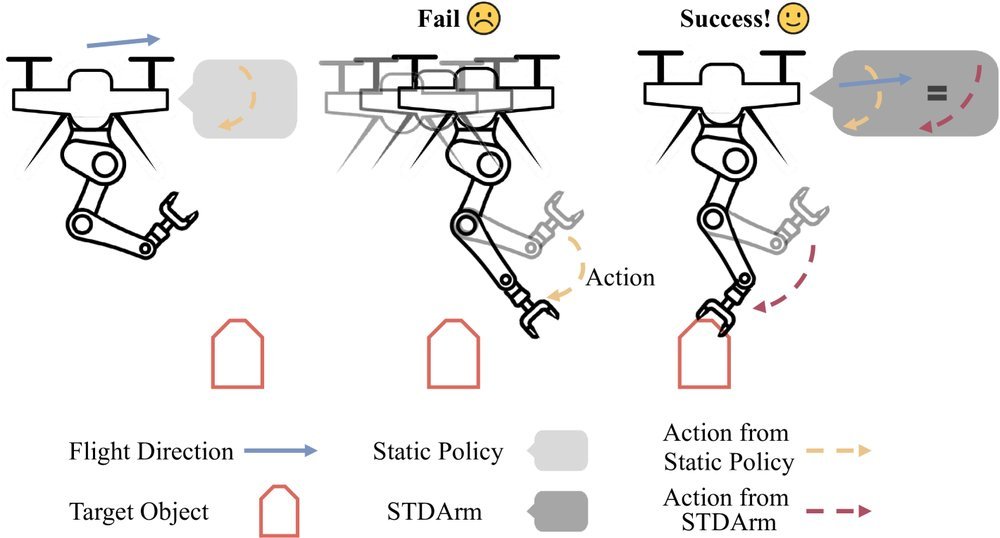
STDArm: Transferring Visuomotor Policies From Static Data Training to Dynamic Robot Manipulation
RSS2025 / General
数据
新标签打开 AlphaXiv
AlphaXiv 中文论文页面(可滚动查看)