精读笔记
Problem Setting
当前3D视觉的三大任务——深度估计、新视角合成(NVS)、3D物体操作——被割裂为独立的专用模型,各自拥有固定的输入输出接口和窄域训练数据。真正的困难不在于单个任务的精度,而在于这些任务本应是同一物理场景的不同查询方式,但现有系统无法共享底层表征,更无法组合推理(例如先移开遮挡物再导航)。关键矛盾是:任务特定设计带来了优化便利,却牺牲了灵活性和跨任务迁移;而粗暴地多任务拼接又会导致控制失准、几何不一致。领域需要一个既能统一训练又能对每个任务实现精确物理控制的框架。
Motivation
已有扩散模型或ControlNet路线能在单任务上实现条件生成,但它们本质上是“给生成模型加装方向盘”,控制信号被压缩进全局latent,导致3D任务中常见的外观畸变、几何漂移和相机尺度歧义。作者的核心观察是:这些任务在物理上都由“什么在动、动多少”决定——optical flow正是这个最直接的中间量。同时,自回归序列模型(如LVM)展示了统一视觉任务的潜力,但全局token和光栅顺序破坏了空间编辑的局部性。关键缺口在于:没有一个生成框架能同时做到(1)用统一目标函数训练所有任务和数据,(2)在patch级别精确读写场景内容,(3)把3D运动显式地暴露为用户可操控的接口。
Core Idea
论文的核心是将3D场景理解从“多任务学习”重新定义为“单一联合分布上的条件推断”。具体而言,它将场景视为一个概率图模型(PGM),节点是局部的多模态patch(RGB、optical flow、相机位姿),边是它们之间的物理依赖。不同的任务不再对应不同的网络头,而仅仅是观测节点与查询节点的不同划分:NVS是“给定RGB+flow,预测RGB”,深度估计是“给定RGB+camera,预测flow”,物体操作是“给定RGB+sparse flow,预测RGB+completed flow”。
这一框架的真正力量在于引入了optical flow作为显式的物理控制面(control surface)。Flow将相机运动或物体变换的低维几何信号与图像外观的高维变化解耦,使得生成模型不再需要直接从“pose变化”猜测“像素变化”,而是先推断像素级运动场,再据此合成外观。同时,通过Hierarchical Local Quantizer(HLQ)和指针-值token序列,模型在自回归生成中保留了严格的局部性:修改一个patch的flow只影响对应局部RGB,而不像全局latent模型那样产生不可预测的连锁反应。这本质上是用局部物理先验替代了全局统计先验,让生成过程从“黑盒采样”变成了“可局部干预的物理推断”。
Method
关键机制有三:
1. 指针化的局部随机访问序列(LRAS)。将每个patch编码为地址指针+离散值token的序列,并在训练时以完全随机的顺序自回归预测。这解决了光栅顺序对空间推理的虚假约束,使模型学会任意方向的条件推断,支持并行解码和局部重采样,而无需修改GPT式的训练目标。
2. 严格局部量化(HLQ)。采用感受野被硬限制在单个patch内的卷积自编码器,确保编码/解码的严格局部性。配合4级层次code(1 coarse + 3 fine),它让token空间的局部编辑与像素空间的局部编辑语义对齐,这是实现精确3D控制的基础。没有HLQ,指针随机访问只会带来混乱的全局依赖。
3. Flow作为因果中间层。训练序列强制因果顺序 [RGB, Camera] → Flow → RGB,使flow成为必经过的瓶颈。这让flow既是可操控的条件(用户输入dense/sparse flow prompt),也是可预测的目标(从camera motion导出depth)。模型因此围绕“运动-外观”的物理规律组织知识,而非死记硬背任务映射。
Key Insight / Why It Works
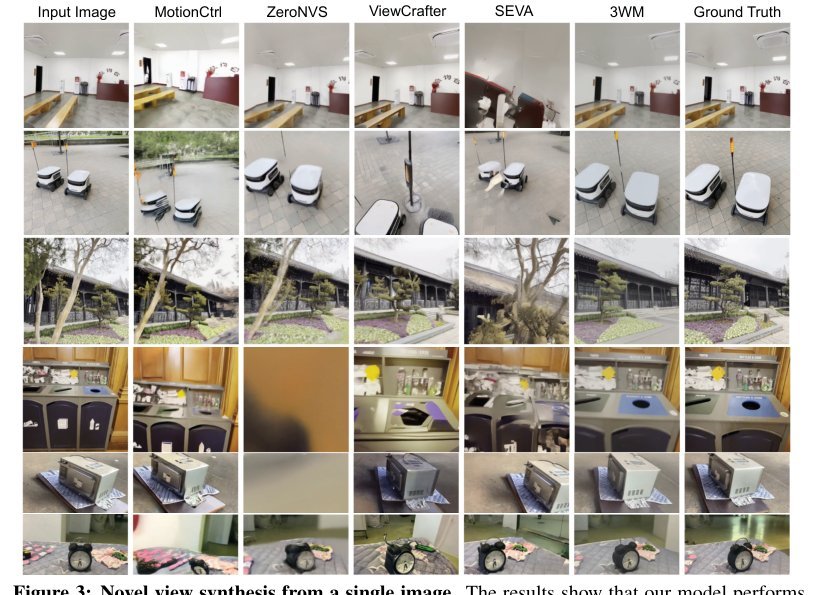
方法有效性的第一性原理在于将难以学习的跨域映射拆解为两个较容易的子问题:几何变化(flow)和外观合成(RGB)。视频数据中,flow的分布远比RGB变化低维且物理一致;自回归模型在7B规模和7000小时视频(BVD)上的scaling,让它能极好地建模 p(RGB|flow) 和 p(flow|camera)。消融实验表明,去掉flow中间层(直接RGB→RGB)后NVS和深度性能骤降,证明flow不是可选的辅助,而是核心结构先验。
然而,必须指出其性能上限部分来自数据覆盖与外部模型的隐式监督。NVS依赖DepthAnythingV2或DUSt3R生成初始flow,物体操作依赖SAM分割背景;这些专用模型的精度直接封顶了3WM的表现。深度估计虽然号称“自监督”,但本质是利用模型学到的“相机平移→flow”统计关联,通过简单downward translation假设提取disparity,这更像是涌现的correlation而非内建的metric 3D重建。文中展示的“组合推理”(如移物后导航)实际上是两个预设推断路径的顺序执行,模型并未维护跨步骤的持久3D状态,因此不宜过度解读为真正的规划或场景级状态更新。
Relation To Prior Work
与LVM/CWM等序列统一模型相比,3WM的真正进步不是“用GPT做视觉”,而是引入了严格局部性和物理中间表征,将序列建模从全局生成工具升级为可局部操控的图推断引擎。与MotionCtrl、FloVD等flow-conditioned扩散模型相比,差异在于3WM把flow嵌入到联合分布的内部节点而非外部控制分支,使得flow既可被输入也可被预测,支持双向因果推断。与DiffusionHandles等3D编辑方法相比,3WM跳过了耗时的null-text inversion和深度条件扩散的复杂管线,通过局部flow prompt直接编辑,鲁棒性更高。
其技术谱系应归为自回归物理世界模型,但它更接近“可查询的生成式3D引擎”,而非传统意义上的视频预测模型。已有思想重组的部分是“指针序列”(类似地址化表示)和“flow作为条件”(视频生成社区早有探索),真正的增量贡献在于将两者与严格局部量化结合,形成了能在真实图像上精确执行3D变换的统一接口。
Dataset / Evaluation
评估覆盖了NVS(真实场景object-centric与scene-level)、3D物体操作(新提出的3DEditBench,100对真实图像刚性变换)和自监督深度(NYU/BONN/TUM)。实验设计在“统一模型zero-shot多任务”这一claim上做得扎实,但存在结构性局限:
3DEditBench规模过小(100对)且仅限刚性变换,对非刚性或复杂多物体交互的定量验证不足。深度评估击败了专门的自监督深度方法(SC-DepthV2等),这有说服力;但击败MotionCtrl/SEVA的深度提取并不公平——后者并非为深度设计,只是作为数据点对比。“真实世界鲁棒性”的论证部分依赖于BVD(7000小时真实视频)的域覆盖。若测试场景与训练视频分布差异大(如极端户外、非刚性形变),局部flow先验是否仍足够?文中未给出域外压力测试。最关键的“组合推理”和“amodal completion”仅有定性展示,缺乏系统性benchmark,难以区分是真实推理还是生成幻觉。
Limitation
方法成立的根本前提是optical flow能可靠地作为3D几何与2D外观之间的充分统计量。在强遮挡、透明/反射材质、极端光照变化或稀疏纹理场景下,flow本身难以定义或估计,整个控制链路会失效。模型并未真正“理解”3D结构,而是学会了在大量视频中观察到的“flow-RGB”联合统计;所谓的几何一致性更多是训练分布内的统计外推,而非基于物理定律的推演。
此外,自回归patch级生成的高昂推断成本限制了其向实时交互应用扩展。7B模型已非小模型,但生成高分辨率图像仍需大量步数。文中承认效率是实际问题。 scalability方面,若想支持更复杂的物理(动力学、形变、光照变化),可能需要更大的模型和数据,届时局部量化与随机访问的序列长度爆炸将成为瓶颈。
最后,当前框架把“任务统一”的范围实质限定在以运动/流为核心的几何任务。对于纯语义理解(如3D检测、密集标注)或长程时间推理(如物理预测、因果推断),文中未展示能力,因此其“通用世界模型”的宣称应被理解为“通用几何世界模型”。
Takeaway
- 1. Flow作为物理提示语言:将optical flow提升为生成模型的原生中间层,是连接3D运动与2D外观的最简洁接口。
- 这一思想可迁移至机器人操作(将动作表示为流场)、具身智能观测合成等领域。
- 2. 局部性是可控生成的必要条件:HLQ+指针序列证明,只有在token空间保持严格局部对应,才能实现精确的局部干预和组合生成。
- 这对任何需要“编辑-再生成”的交互式AI系统都是关键设计原则。
一句话总结
3WM通过以optical flow为显式物理接口、以严格局部量化为控制基石,将自回归生成模型重新配置为可查询的3D场景图推断引擎,证明了统一几何世界模型在真实图像上的精确可控性,但其本质仍是数据驱动的统计关联而非内建物理推演,且严重依赖外部几何前置模型与自回归推断的scaling成本。