主页
← Embodied AI TopConf Index
+
点赞
0
Embodied AI TopConf · CVPR2025
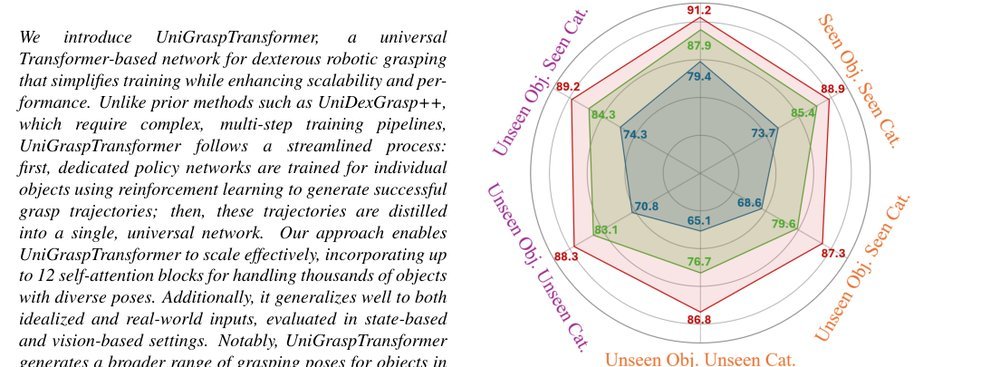
UniGraspTransformer: Simplified Policy Distillation for Scalable Dexterous Robotic Grasping
CVPR2025 / Grasp
策略学习
灵巧操作
抓取
新标签打开 AlphaXiv
新标签打开 Project
AlphaXiv 中文论文页面(可滚动查看)