主页
← RSS2024 Index
RSS2024 Paper 006
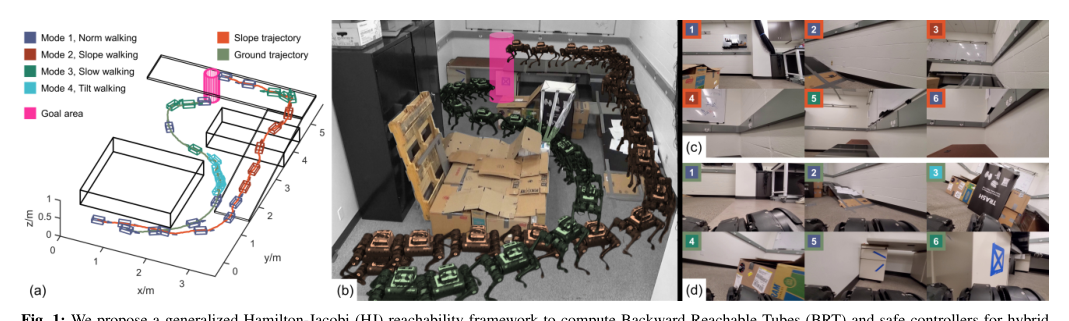
Hamilton-Jacobi Reachability Analysis for Hybrid Systems with Controlled and Forced Transitions
Javier Borquez, Shuang Peng, Yiyu Chen, Quan Nguyen, Somil Bansal
机器人学习
控制
安全
触觉
腿足机器人
规划
新标签打开 AlphaXiv
新标签打开 arXiv
新标签打开 Project
AlphaXiv 中文概览(可滚动查看)