主页
← RSS2024 Index
RSS2024 Paper 010
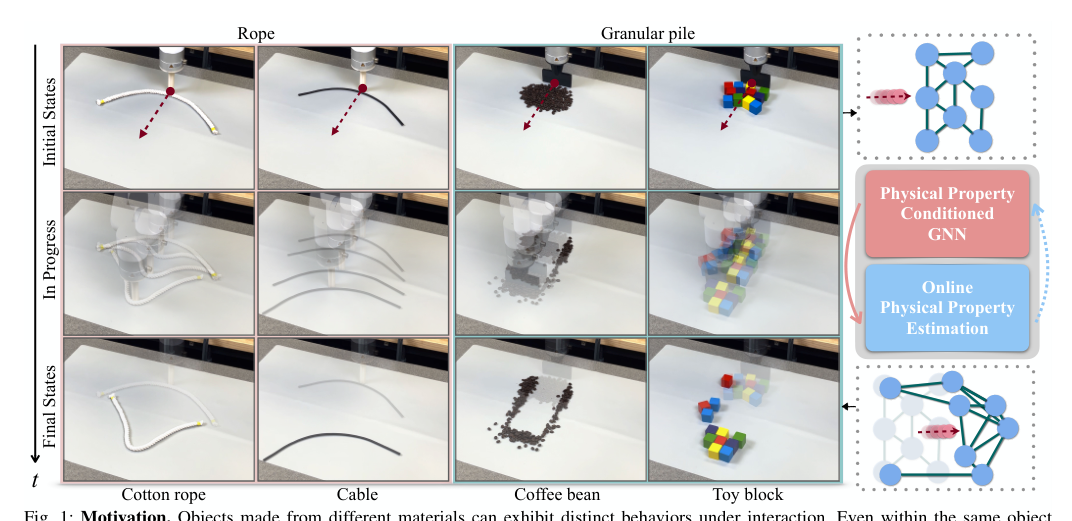
AdaptiGraph: Material-Adaptive Graph-Based Neural Dynamics for Robotic Manipulation
Kaifeng Zhang, Baoyu Li, Kris Hauser, Yunzhu Li · University of Illinois Urbana-Champaign
控制
操作
人机交互
机器人学习
数据
感知
新标签打开 AlphaXiv
新标签打开 arXiv
新标签打开 Project
AlphaXiv 中文概览(可滚动查看)