主页
← RSS2024 Index
RSS2024 Paper 013
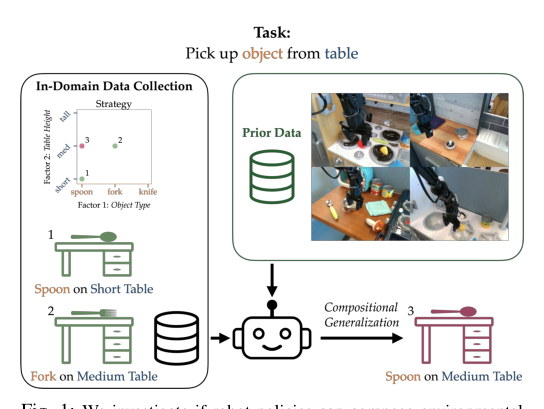
Efficient Data Collection for Robotic Manipulation via Compositional Generalization
Jensen Gao, Annie Xie, Ted Xiao, Chelsea Finn, Dorsa Sadigh · Stanford University, 2Google DeepMind
机器人学习
数据
操作
模仿学习
基础模型
感知
新标签打开 AlphaXiv
新标签打开 arXiv
新标签打开 Project
AlphaXiv 中文概览(可滚动查看)