精读笔记
Problem Setting
真正要解决的是低成本农田机器人在狭窄行间、强遮挡、GPS失灵、LiDAR噪声大的情况下如何持续安全前进。关键难点不是路径规划本身,而是感知信号极不稳定:机器人只看得到局部行结构,且这个局部结构会被叶片、杂草、残茬和光照变化不断破坏。以前方法的卡点非常明确:端到端感知在这种环境里会出现偶发大错,而这种大错比平均误差更致命;纯几何/分割方法又无法稳当地把噪声视觉输出变成控制量。这个任务的核心矛盾是:你既需要强结构先验,又需要对结构缺失保持保守。
Motivation
已有路线的问题不在于“不能跑”,而在于它们缺少一个能同时兼顾解释性和异常处理的中间层。直接回归状态的系统太脆,遇到遮挡时没有办法说自己不确定;分割/检测类系统虽然看起来更语义化,但最终仍要靠很多几何后处理把图像变成状态,噪声会被多次放大。作者的核心观察是:under-canopy 场景其实有强结构先验,行间几何比外观更稳定,因此最合适的表征不是像素级语义,而是少数几个和控制直接相关的语义几何点。这个缺口一旦被看到,就自然会从“直接预测状态”转向“预测可解释几何锚点”。
Core Idea
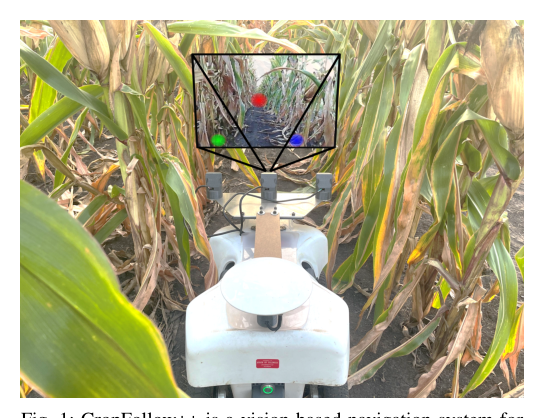
核心思想是把 under-canopy row following 重新定义成一个结构化几何估计问题,而不是控制回归问题。网络不再输出机器人动作或抽象 state,而是输出三个语义关键点:消失点与左右行边界的底部交点。这三个点恰好把“机器人应当在什么位置、朝什么方向走”编码成最小的几何充分统计量。这样一来,学习模块只需要解决一个局部、可监督、可解释的视觉定位问题;控制模块则继续做它擅长的事:在约束下稳定跟踪。这个重构的价值在于,它把不稳定的端到端责任链拆开了,并把“不确定性”显式放进表示里。
Method
第一步是把图像中的行结构压缩为三个语义关键点:消失点和左右边界交点。这一步解决的是“如何让感知输出具有任务所需的最小几何信息”,原因在于行间导航的控制真正依赖的不是完整分割,而是相对姿态。第二步是把关键点通过相机几何和IMU roll 反演成 heading 与 lateral distance。这一步的价值在于把学习输出重新映射回一个可控状态空间,避免网络直接承担控制责任。第三步是用热图方差和几何边界做异常拒绝。它解决的是遮挡导致的离群预测问题,必要性在于 under-canopy 环境里“看不清”比“看错一点”更常见。第四步才是MPC跟踪。控制器在这里不是创新点,但它让系统能在约束下稳定消化前端的几何状态。整体机制是:学习负责识别结构,几何负责恢复状态,控制负责执行;而不是让一个模型端到端吞下所有不确定性。
Key Insight / Why It Works
这篇论文有效,核心不是因为关键点比直接回归更“高级”,而是因为它把学习问题对齐到了任务里的不变量:行间几何比像素外观更稳定。CropFollow 的失败在于它试图让网络直接学从图像到状态的闭式映射,这对遮挡和少量异常极其敏感;CropFollow++ 则让网络只负责抽取可几何化的中间量,再由显式几何和控制器完成状态恢复。这个分解带来的归纳偏置很强:1) 输出空间更小、更受约束;2) 关键点热图天然包含置信度线索;3) 几何反演利用了场景先验,减少了纯数据拟合压力。换句话说,它的稳健性主要来自 better inductive bias,而不是更大的模型、更复杂的训练或更强的规划。辅助增益来自两处:一是用IMU roll 做几何校正,二是用启发式拒绝离群点。前者是真正的状态恢复增益,后者更像工程保险。这里最值得注意的是,所谓“鲁棒”主要是通过拒绝错误而不是修复错误实现的,因此它更像一个保守的感知-控制系统,而不是一个能在强遮挡下持续推理的系统。
Relation To Prior Work
它最接近两条谱系:一条是 CropFollow 那类直接回归 robot state / affordance 的视觉导航;另一条是 mediated perception 的 row detection / segmentation。CropFollow++ 真正的变化不是又做了一个视觉模型,而是把 affordance 回归改写成结构化关键点估计。与前者相比,它多了可解释性和不确定性表达;与后者相比,它少了很多后处理依赖,几何链条更短。它也借用了 manipulation 中 keypoint pose estimation 的思想,但这里不是简单迁移:关键点不是物体姿态的局部标记,而是任务空间中的行结构锚点。可以说,它是把“结构化中间表示”这一思想从 manipulation 挪到了农田导航,但落点更偏任务几何而非对象本体。
Dataset / Evaluation
评估的强项是真机而不是纯离线。论文不仅用扩充后的多季节数据训练,并在晚季强遮挡条件下直接比较旧方法和新方法,还把系统放到多台 cover crop planting robot 上累计跑了较长距离。这个设计能支持作者最重要的 claim:改表征确实改善了真实导航鲁棒性,而不是只在离线指标上更好看。不过,评估仍然偏向作者定义的场景:行结构规则、任务明确、环境与训练集同源。它证明的是“在这类农田行间导航里,结构化关键点表征更稳”,而不是一个普适视觉导航框架。
Limitation
方法成立依赖几个隐含前提:行是大体平行且近似直线的,单视野内主要关注一条 lane,几何参数可由相机标定和IMU较稳定地恢复,且连续长时间遮挡不会太多。一旦这些前提不满足,关键点语义就会变得含混,几何反演也会退化。另一个上限是它对异常的处理是“停更/拒绝”,不是“理解/补全”,所以连续异常会直接把系统推向失败。增益归因也并不完全清晰:离线指标更好说明表示更强,但字段里的大幅提升,可能同时来自数据覆盖、场景匹配、启发式过滤和 MPC 的共同作用,不能简单把所有收益都归因于关键点表征本身。最后,大规模部署更多证明工程可落地,而不是方法对更一般农业场景的外推能力。
Takeaway
- 这篇工作最值得记住的不是“关键点更好”,而是它证明了在强几何先验场景里,鲁棒性往往来自把学习目标改成可解释的结构中间层,而不是继续堆更大的端到端模型。
- 它也提醒我们:很多 real-world robustness 不是从更强推理得到的,而是从更合适的表征、显式拒绝机制和保守控制得到的。
- 对类似任务,值得迁移的 insight 是:先找任务里最稳定的几何不变量,再让网络只估计这些不变量。
一句话总结
这是一篇把 under-canopy 行间导航从“直接状态回归”改造成“关键点几何估计 + 异常拒绝 + MPC”的工作,其真实贡献是更强的任务归纳偏置与真机鲁棒性,而不是单纯的模型升级。