主页
← RSS2024 Index
RSS2024 Paper 046
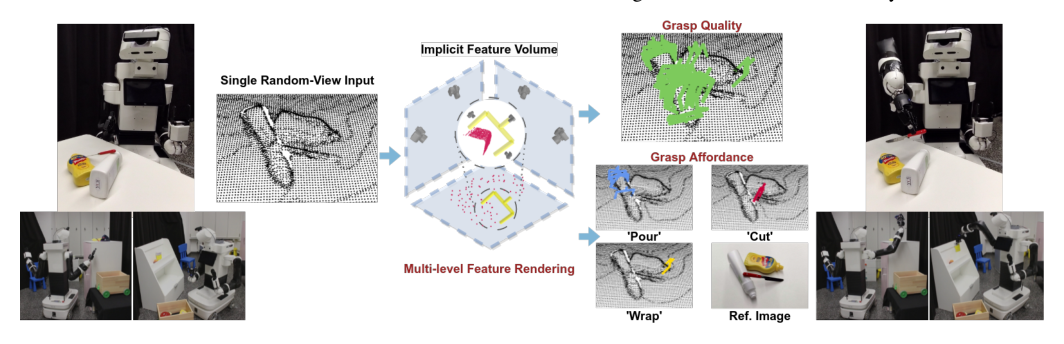
Learning Any-View 6DoF Robotic Grasping in Cluttered Scenes via Neural Surface Rendering
Snehal Jauhri, Ishikaa Lunawat, Georgia Chalvatzaki
机器人学习
灵巧手
操作
移动操作
安全
生成模型
新标签打开 AlphaXiv
新标签打开 arXiv
新标签打开 Project
AlphaXiv 中文概览(可滚动查看)