主页
← RSS2024 Index
RSS2024 Paper 063
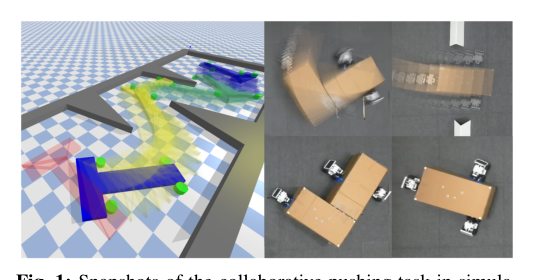
Collaborative Planar Pushing of Polytopic Objects with Multiple Robots in Complex Scenes
Zili Tang, Yuming Feng, Meng Guo · College of Engineering, Peking University
机器人学习
操作
控制
触觉
规划
导航
新标签打开 AlphaXiv
新标签打开 arXiv
新标签打开 Project
AlphaXiv 中文概览(可滚动查看)