主页
← RSS2024 Index
RSS2024 Paper 081
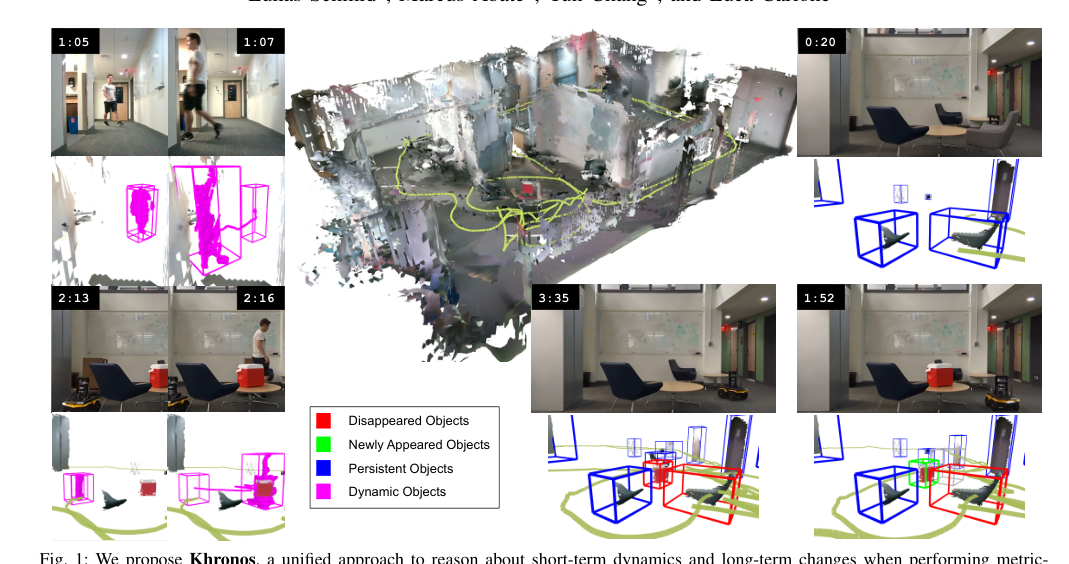
Khronos: A Unified Approach for Spatio-Temporal Metric-Semantic SLAM in Dynamic Environments
Lukas Schmid, Marcus Abate, Yun Chang, Luca Carlone
机器人学习
SLAM/定位
控制
感知
安全
基础模型
新标签打开 AlphaXiv
新标签打开 arXiv
新标签打开 Code
AlphaXiv 中文概览(可滚动查看)