精读笔记
Problem Setting
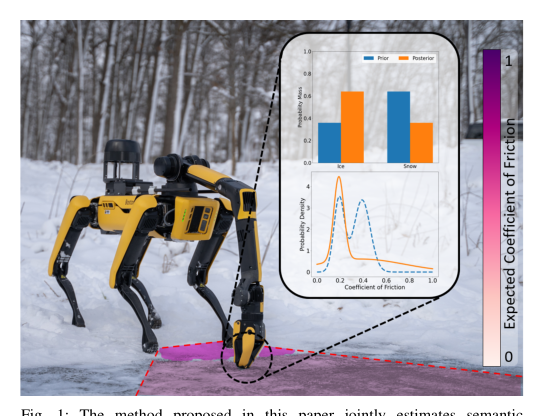
这篇论文真正解决的问题,是机器人在运行中如何把“视觉语义的不确定性”和“物理属性的可变性”统一到一个可在线更新的表示里。困难不在于预测一个标签,而在于标签本身对任务价值有限,真正决定行动的是摩擦、承载、开放方向等属性;但这些属性既稀疏又局部,无法像图像分类那样大量监督训练。以前方法要么只做语义地图,要么只做属性回归,而且多数把属性当静态先验。这个任务的关键矛盾就是:视觉提供全局覆盖但证据弱,触觉提供局部高质量证据但采样稀疏,怎么把二者变成一个能在地图和决策之间循环的信息结构。
Motivation
为什么作者会想到这个方向,关键在于他们盯住了机器人任务里的真实瓶颈:任务失败往往不是因为不知道类别名,而是因为不知道这个类别对应的物理后果。仅靠视觉的语义分割再强,也解决不了 ice 和 snow 这类对摩擦差异敏感但外观易混的情况。过去的做法要么假定属性已知、不可变,要么把触觉当作独立的 supervised signal;这两个都不适合运行时在线修正。作者的核心缺口判断就是:缺少一个能把物理量作为证据、同时又能回写语义的概率模型。
Core Idea
这篇工作的本质是把“语义分类”和“物理属性估计”从两个并列任务改造成一个可互相校正的联合贝叶斯推断问题。视觉先提供类别分布,触觉再提供属性证据,属性证据不是只更新一个属性标量,而是会回写到语义后验里,改变类别可信度。这个设计的 inductive bias 很明确:环境中的语义标签和物理属性不是独立头输出,而是共享同一个生成解释。这样做的意义在于,机器人不必依赖额外训练数据去学习新的类别-属性对应关系,而是可以用少量在线测量把先验逐步改正。和 prior 的本质差别在于,prior 多数是“视觉语义→属性”的单向查表或离线学习,这里则是“语义↔属性”的闭环推断。
Method
关键机制只有四步,但每一步都服务于同一个目标:让视觉和触觉在同一后验里互相修正。第一步,用视觉分割结果构建可累积的语义地图,把单帧分类变成空间上可融合的后验;它解决的是时序不一致。第二步,把每个语义类对应的物理属性表示成分布而不是常数,它解决的是类内属性波动。第三步,当触觉测量到来时,先通过当前语义后验计算属性似然,再反向更新语义分布,它解决的是视觉歧义无法闭合的问题。第四步,用 moment matching 把更新后的复杂后验投影回可递推的共轭族,它解决的是多轮在线更新不可计算的问题。这个方法的核心不是某个传感器,而是把“测量—解释—再解释”的循环做成了闭式可更新。
Key Insight / Why It Works
真正起作用的点,我判断不是某个分割网络更强,而是概率结构本身把“语义歧义”变成了“属性可证伪”的问题。视觉在这里负责提供初始假设,触觉负责提供高置信的局部证据;一旦二者被统一到同一个后验空间里,原本在图像域里难以区分的类别(比如 snow/ice、concrete/wood 这类会导致不同摩擦后果的东西)就可以被属性测量打散。换句话说,这不是更强的识别器,而是更好的证据组织方式。最值得注意的是,方法的收益很可能主要来自这种更强的 inductive bias:它让“少量触觉样本”变成语义更新的高价值锚点,而不是继续堆视觉数据。与此同时,也要直接判断:Gaussian mixture 的 moment matching 投影更像是为了让系统可在线运行的工程近似,真正核心贡献不是这一步数学花活,而是把属性测量纳入语义后验更新。
Relation To Prior Work
它最接近的谱系有三条:语义地图的概率融合、基于语义的属性估计、以及多模态感知的贝叶斯更新。但本质上它不是简单拼接,而是把前两者之间原本单向的 conditioning 改成双向推断。和传统语义地图相比,它新增的是物理属性这一层中介变量;和传统属性估计相比,它新增的是属性反过来修正语义的机制;和学习式多模态方法相比,它的不同不在于特征更强,而在于显式概率结构和在线闭式更新。需要承认的是,Gaussian mixture 的 approximate conjugate prior 这部分有一定“为了让数学闭环而重组现有思想”的味道,真正新的是把这套重组放进机器人在线地图里,而不是提出了全新的概率理论。
Dataset / Evaluation
评估覆盖了仿真、真机操控和腿足机器人导航三个层次,说明作者并不只想证明分类准确率,而是想证明物理属性后验能进入任务级决策。仿真部分主要验证:少量属性测量是否能修正视觉误分类;真机部分验证:摩擦测量能否在线修复语义地图;机器人任务部分验证:属性不确定性能否触发风险感知行为切换。这个 evaluation 对核心 claim 是有支撑的,但也有明显局限:很多场景本质上还是围绕材料/地面这类低维属性展开,离真正复杂的物理推理还比较远。也就是说,它更像验证了“语义-属性闭环”的可行性,而不是验证了一个通用物理世界模型。
Limitation
这篇论文的上限受制于它对先验和闭集类别的依赖。它默认类别集合已知、类属性分布可初始化、并且语义网络至少不能长期系统性出错;否则后验会被错误先验锁死。其次,属性-语义耦合是手工设定的,不是学习出来的,因此当环境属性分布跨场景漂移时,增益来源不清,可能主要来自 benchmark 里类属性关系本来就比较稳定。第三,所谓在线推断虽然是贝叶斯式的,但本质仍然是基于局部测量和预设混合模型的递推更新,不等于真正形成了可迁移的物理常识。最后,地图存储、voxel 规模、测量定位误差和接触噪声都被弱化了;这些问题一旦放大,方法的稳定性和可扩展性会比论文展示的更脆。
Takeaway
- 最值得记住的不是“它用了触觉”,而是它把触觉变成了语义后验的证据,从而让属性估计不再只是分类器的附属输出。
- 这个思路对后续工作最有价值的迁移点,是把任务相关的物理量当成中间状态,而不是把它们压成最终标签或单标量回归。
- 真正该继续做的,不是再把这个框架包一层深网,而是:学习更可信的 class-property priors、处理开放世界类别、把主动采样和风险决策接到同一个不确定性上。
一句话总结
这是一篇把视觉语义和触觉属性做成双向在线贝叶斯闭环的机器人感知论文,其核心贡献是用可递推的概率耦合把“看见是什么”升级为“知道它会怎样影响任务”。