精读笔记
Problem Setting
它实际解决的是多机器人在二维栅格中、面对大量局部冲突时的在线规划问题,重点落在“狭窄瓶颈导致的局部死锁与爆炸性等待”。真正困难点不是找一条单机器人路径,而是多个机器人在 doorway 处彼此阻塞时,联合状态空间会迅速失控。以前方法卡在两类地方:一类是纯 decoupled/piority 方法在拥挤场景里不完整,容易死锁;另一类是 CBS 这类完整搜索会在瓶颈处长出不可管理的冲突树。这个任务的关键矛盾是:局部冲突必须被精确协调,但协调本身又不能演化成全局联合搜索。
Motivation
真正的动机不是“让 DDM 多支持一种模板”这么简单,而是意识到现实室内环境的主要瓶颈并不是大开阔区域,而是门洞、窄门、短走廊这些会把局部耦合放大的位置。已有方法之所以不够,是因为它们默认局部冲突可由无障碍的小块解决,或者默认狭窄区域不存在分叉死锁。作者的核心观察是:只要把 doorway 当作可重复出现的局部原语,经验库就有机会覆盖真实建筑里最常见的困难区域。缺的不是更强的全局搜索器,而是能表示现实瓶颈拓扑的局部记忆。
Core Idea
论文真正的想法是把 MAPF 的在线冲突处理,从“搜索整个联合状态空间”转成“识别局部结构并检索已知解”。它不是试图学习一个泛化的协调策略,而是承认狭窄通道里的难点主要来自有限拓扑类型,于是把问题编译成少数 canonical templates。这样做的好处是:复杂性从在线推理转移到离线覆盖,在线阶段只需要结构匹配、目标重排和一步执行。这个 inductive bias 很强:它假设真实环境中很多瓶颈都能被少数模板表达,并且局部协调可以通过记忆复用完成。
Method
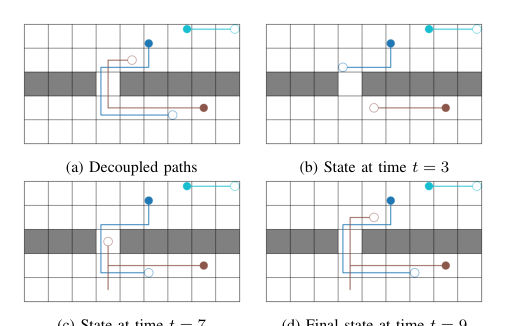
方法的关键机制只有三层。第一层是在线主循环:机器人默认沿各自 decoupled path 前进,只有在冲突发生时才介入,这保证计算主要花在瓶颈处。第二层是 subproblem 选择:把冲突局部匹配到模板,并用“覆盖更多冲突、引入更少等待、占用更小区域”的准则选 placement,这实际上是在控制局部修复的代价和外溢影响。第三层是临时目标与数据库检索:把参与机器人映射到 subproblem 内的临时目标,再从穷举数据库拿到一步解,而不是执行完整局部轨迹。这个设计的意义是,局部解只提供一个短程协调信号,后续仍允许全局路径重新组织,因此比 DDM 那种把整个子问题解强行执行到底更灵活。
Key Insight / Why It Works
它之所以有效,核心不是“更聪明地搜”,而是“更聪明地约束局部问题的形状”。门洞和短窄通道的难点在于局部冲突图的自由度太小,全局搜索会被迫反复探索等价状态;而 template-based retrieval 直接把这些等价状态折叠掉。尤其是作者的几个设计选择——优先沿原路径设临时目标、优先覆盖更多冲突、只执行子问题的第一步——本质上都在减少不必要的状态偏离,让系统把算力花在真正需要重排的局部,而不是把一次局部协调变成长期偏离。这里最可能是核心贡献的是“局部结构检索 + 一步修复 + 最小偏离”的组合;相对而言,新增 5×2 doorway 模板本身更像能力边界的扩展,属于必要但未必充分的工程补强。
Relation To Prior Work
它最接近 DDM、DCBS 这条经验式 MAPF 谱系,也和 CBS/PBS/M* 这类冲突驱动协调方法相关。真正不同点在于:prior 只把经验库用于宽松、无障碍的小局部,而这篇论文把经验库推进到有障碍、尤其是 doorway 拓扑。表面上看,它只是多加了一个 5×2 模板;实际上真正的变化是把经验复用从“平面局部解缓存”扩展为“拓扑敏感的局部协调缓存”。和 CBS 相比,它不是在搜索树上剪枝,而是直接绕开搜索树;和 DDM 相比,它不是简单扩大数据库,而是改变了局部结构、等待逻辑和目标分配方式。
Dataset / Evaluation
评估覆盖了两类很不同的场景:一类是 warehouse-like 的宽敞环境,用来验证新策略即使在 DDM 原本擅长的域里也能改善 waiting 和路径偏离;另一类是包含 doorways 的房间式平面,用来验证方法是否真的跨出了 DDM 的适用范围。这个评估对论文 claim 是基本对上的:它确实证明了 doorway domain 的扩展,而不是只在原域内调参。但它主要还是离线 benchmark 评估,没有真机、没有动态障碍、没有连续时空约束,因此只能说明 MAPF benchmark 上的可行性,不能直接推出部署层面的鲁棒性。
Limitation
它的前提很强:环境必须能被分解成非分叉 narrow corridors + free space,且这些窄通道拓扑必须能映射到少数模板。换句话说,它不是一般 MAPF 的统一解法,而是对一类高度结构化环境的专用 cache。其次,增益来源不完全清楚:一部分来自新的 doorway template,一部分来自更好的 subproblem 选择和 temporary goal 策略,一部分则来自“只执行一步”这个时间调度策略;这些因素在实验里有区分,但没有被完全理论拆解。再者,这方法很像 retrieval-based planning,而不是新的协调原理;数据库越全,它越强,因而其“泛化”更像 coverage 充分后的插值,而不是真正的 out-of-distribution 推理。最后,在极高拥挤度下,局部一步修复可能反复触发同类冲突,说明该策略不是无条件优于执行完整子问题解。
Takeaway
- 最值得记住的不是 doorway 模板本身,而是这篇论文证明了:MAPF 的经验式加速并不一定只适合开阔仓储域,只要你能把真实环境中的瓶颈拓扑抽象成少数 canonical local problems,记忆复用就能把最难的那部分冲突处理从搜索问题变成检索问题。
- 第二个值得迁移的 insight 是,局部修复不必执行到完成;只执行第一步并允许全局路径重新组织,往往比一次性“解决彻底”更适合连续到达、持续分配的系统。
- 第三个 insight 是,选择 subproblem 和临时目标的策略,其实比模板数量更影响实际收益。
一句话总结
这是一篇把 MAPF 的瓶颈处理从“在线联合搜索”转成“面向门洞拓扑的经验检索式局部修复”的工作,实质贡献是扩展了经验式规划的适用环境边界,而不是提出了一种全新的全局协调范式。