主页
← RSS2024 Index
RSS2024 Paper 096
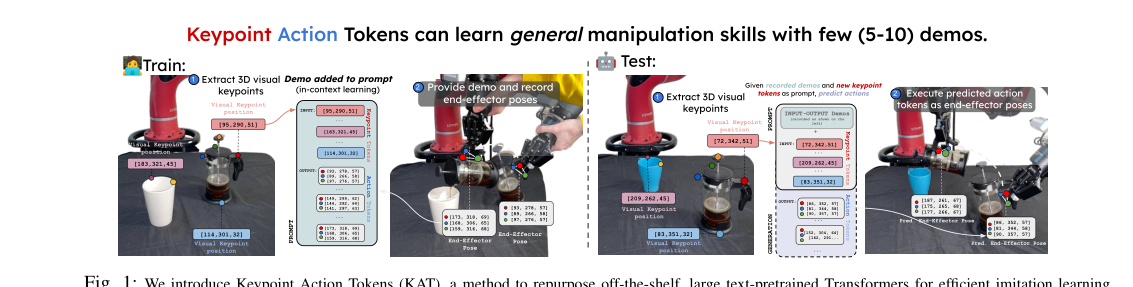
Keypoint Action Tokens Enable In-Context Imitation Learning in Robotics
Norman Di Palo, Edward Johns · Imperial College London
模仿学习
感知
数据
基础模型
机器人学习
扩散策略
新标签打开 AlphaXiv
新标签打开 arXiv
新标签打开 Video
AlphaXiv 中文概览(可滚动查看)