精读笔记
Problem Setting
这篇论文解决的不是一个单独的感知问题,而是 continuum/soft 机器人在真实交互时“看不见自己,也不知道碰到了什么”的系统性缺陷。难点在于:姿态会变化、接触会改变姿态、传感器又不能像刚体机器人那样轻松嵌入;因此最难的不是回归一个角度,而是找到一种同时对形变和接触敏感、又足够可扩展的观测方式。以前路线要么靠复杂建模,要么靠稠密电子传感器,要么只在单一模态上做局部估计,始终卡在可制造性和可泛化性之间的矛盾。
Motivation
作者想补的缺口是“continuum 机器人只有姿态估计,没有触觉;或者只有触觉,没有能迁移的形态估计”。更深一层的动机是,传统 continuum sensing 太依赖 bespoke hardware:传感器装得越多,系统越难扩展、越难校准、越难泛化。于是他们选择从 vision-based tactile sensing 这条线切入,因为它天然更适合大面积软表面;再把它从刚性 finger / straight body 推到真正会弯的 skin 上,试图跨过 continuum 场景的主要障碍——marker occlusion。
Core Idea
ConTac 的真正想法是:不要把 continuum robot 的状态估计建立在“内部传感器逐点测量”上,而是建立在“可见皮肤形变的视觉反演”上。软皮肤本身成为一个大面积、连续、可学习的 sensing medium,内部相机负责把形变模式读出来;网络则学习从图像直接恢复整张形状场和接触参数。这个设计的本质收益不是精度数字,而是把 continuum 的高维状态压缩成一个统一的视觉表示,使 proprioception 和 tactile sensing 共享同一信息通道。
Method
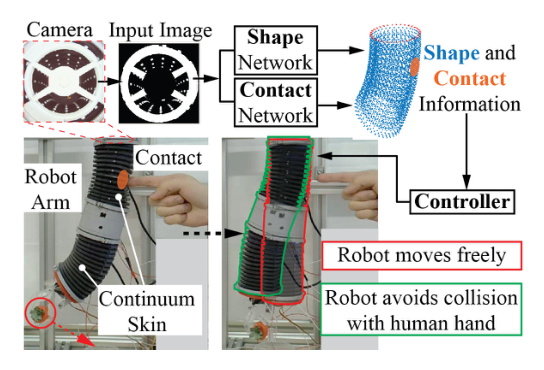
关键机制只有三步。第一步,构造一个可观测的软皮肤外层,把原本不可直接测量的连续体形变转成视觉信号;这一步解决的是“怎么把状态暴露给传感器”。第二步,用仿真生成配对监督,训练两个回归网络分别恢复形状场与接触参数;这一步解决的是“没有真实标注怎么办”,同时把复杂 soft-body 状态学习成一个视觉映射。第三步,把估计出的形状和接触直接喂给 admittance control,使机器人对碰撞做机械式退让;这一步的作用是证明感知不是孤立的,而是能进入闭环。整套方法的核心变化是:状态估计从稀疏、专用、难扩展的传感器网络,变成了一个基于视觉的统一反演问题。
Key Insight / Why It Works
它之所以有效,最可能的原因不是网络结构本身多么新,而是表示空间被设计对了:连续体姿态和接触事件被编码到同一个皮肤形变图像里,网络只需做高维外观到状态的回归,不必显式处理复杂的软体物理。sim-to-real 的成功也主要来自这个表征对齐:皮肤形状、marker 布局、相机视角、遮挡模式都被高度约束,因而仿真到真实的 gap 比想象中小。真正的贡献更像是“把 sensing 问题封装成一个可学习的视觉逆问题”,而不是提出新的连续体理论。相对弱的一点是接触定位:其性能明显受遮挡限制,说明模型更像在利用局部可见纹理和几何相关性做回归,而非形成了真正稳健的接触几何理解。
Relation To Prior Work
它最接近两条谱系:一条是 continuum / soft robot 的 learning-based proprioception,另一条是 vision-based tactile sensing。和前者相比,ConTac 不是只估姿态,而是把接触也纳入同一视觉框架;和后者相比,它不把 skin 固定在刚性部件上,而是让皮肤本身随 continuum 形变,处理更麻烦的 marker occlusion。真正的新意不在于 U-Net 或 sim-to-real 本身,而在于把这两条路线拼接成一个适用于 continuum skin 的统一 sensing system。换句话说,算法并不神秘,真正新增的是“连续体软皮肤+视觉触觉+接触控制”这一整套信息组织方式。
Dataset / Evaluation
数据上最关键的是仿真合成,而不是人工采集。作者用物理仿真+渲染生成训练集,试图让模型学到“形变外观—几何状态”的对应关系,再直接零样本迁移到真实系统。评估覆盖了三件事:形状恢复、接触定位/深度、以及基于这些估计的安全避障控制。它确实验证了核心 claim 的一部分:模型在真实机上可用,且对同构第二单元可迁移。但评估仍然偏窄,主要是受控实验室场景,并没有真正证明在更复杂接触、更多自由度、更多外观变化下依然成立。
Limitation
限制是结构性的,不是小修小补能解决的。首先,系统依赖高度一致的硬件几何和成像设置,一旦 skin 厚度、marker 分布、相机位置或执行器形态变化,zero-shot 的前提就会明显变弱。其次,当前结果更像是在一个强约束、低维、可控的 benchmark 上证明可用性,而不是证明理论上对 continuum 机器人成立。再次,控制部分比较保守:它使用 contact depth 触发的 admittance 回避,基本没有真正利用接触位置去做策略级决策,所以所谓“contact-aware manipulation”有很大一部分只是安全反应控制。最后,增益来源可能主要是 data coverage 和几何约束,而不是网络对连续体动力学的深层理解;换言之,这更像是一个做得很好的 sensing pipeline,而不是一个突破性的机器人表征方法。
Takeaway
- 1) 这篇工作的主要价值是把 continuum 机器人的 proprioception 和 tactile sensing 统一到一个视觉反演框架里,而不是提出了某个新网络。
- 2) 它的迁移性目前更像“同构模块迁移”,不是跨形态泛化;因此其可扩展性还停留在早期。
- 3) 该方法最值得迁移的 insight 是:对于复杂软体结构,先设计一个可观测的外壳,再用仿真学习状态恢复,往往比直接在体内布满传感器更可行。
- 4) 但若目标是更复杂的操作智能,这条路线还需要补上多接触、3D 形变、主动探测与更强的接触语义建模。
一句话总结
ConTac 把 continuum 机器人感知从“嵌入式传感”转成“视觉驱动的软体状态反演”,真正贡献是一个可迁移到同构软皮肤模块的形状/接触统一估计框架,而不是新的连续体控制理论。