主页
← RSS2024 Index
RSS2024 Paper 104
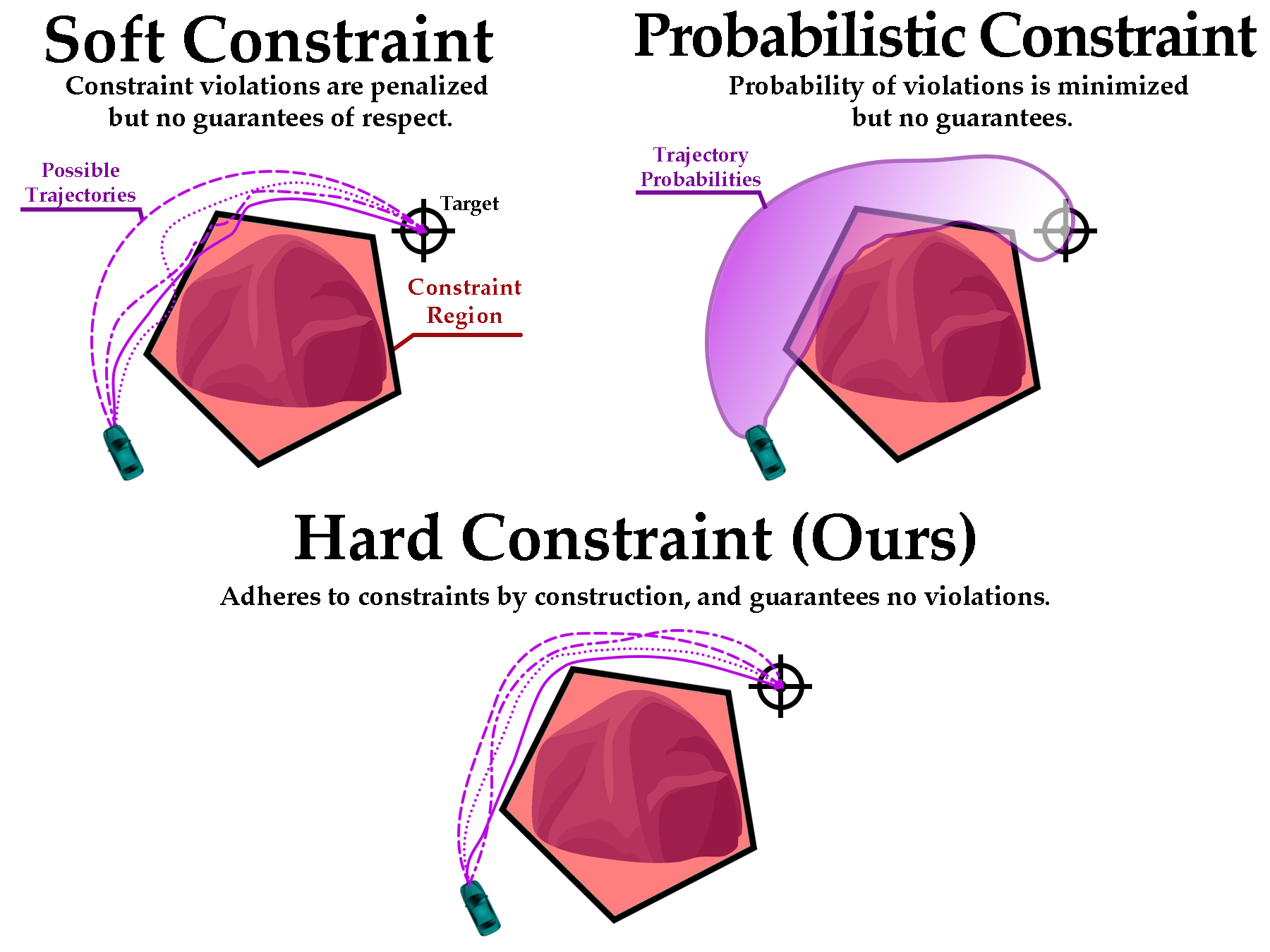
POLICEd RL: Learning Closed-Loop Robot Control Policies with Provable Satisfaction of Hard Constraints
Jean-Baptiste Bouvier, Kartik Nagpal, Negar Mehr · ICON Lab, University of California Berkeley
机器人学习
安全
强化学习
触觉
控制
人机交互
新标签打开 AlphaXiv
新标签打开 arXiv
新标签打开 Code
AlphaXiv 中文概览(可滚动查看)