精读笔记
Problem Setting
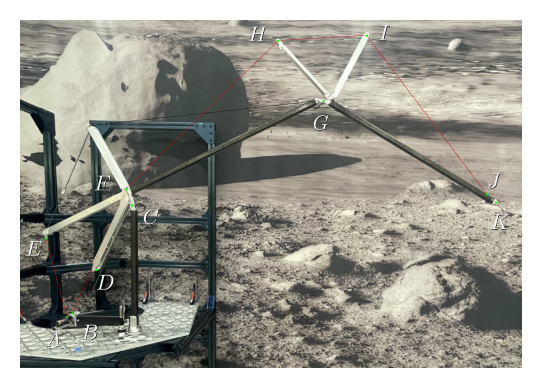
这不是普通的 crane tracking 问题,而是一个受几何约束支配的 hybrid control 问题:输入是电机速度,状态是关节角,但二者之间要经过缆长、滑轮、支架接触和张紧条件的多层映射。困难点在于,控制输入对关节的作用方向会随模式切换而改变,且肩肘两个关节天然耦合,单独调一个 motor 可能同时影响多个角。以前方法卡住的地方就在这里:要么把系统过度简化成连续模型,导致切换失真;要么采用更一般的非线性控制,却难以把结构信息转化为可证明的精确跟踪。关键矛盾是轻量化/可伸缩设计与可控性之间的张力。
Motivation
作者真正关心的是:为什么 LSMS 这种为月球/火星任务优化的轻量长臂机构,反而最缺少可用的高精度控制。答案在于它的工程优势正是控制困难的来源——缆驱把电机放在基座上,省质量但引入耦合;spreader 让结构能跨越更大工作空间,却带来离散模式切换;长臂和轻质化提高载荷比,却让张紧与可控性更脆弱。已有 crane 控制大多默认连续、低耦合、或末端负载主导的动力学,因此缺的是一个专门针对“serial cable-actuated + hybrid geometry”的可证明跟踪框架。
Core Idea
核心思想可以概括为“把机构几何本身变成控制器的一部分”。论文不是先抽象成一个黑箱非线性系统再做鲁棒化,而是显式利用缆长-关节角映射、spreader 接触导致的模式切换,以及张紧约束,把控制律写成分段解析形式。这样做的好处是:耦合项被结构性补偿,切换不是扰动而是模式信息,最终闭环在理想模型下几乎被压成一组独立的一阶误差动力学。这个思路的本质差异在于,它依赖的是“几何可逆性 + 模式已知”,而不是更强的观测/学习能力。
Method
机制上分三步。第一步,把 LSMS 的缆长表达拆成不同接触模式下的解析几何关系,并显式计算模式切换角,这保证控制器知道自己处于哪一个动力学分支。第二步,利用 motor speed cable length rate joint rate 的链式关系,构造带前馈的反演控制,让期望关节速度直接映射到电机命令。第三步,在理想几何下用比例项把误差压成指数衰减,在非理想几何和电机误差下改用 Lyapunov/UUB 分析把误差限制在可计算的邻域内。整个方法的本质是用结构化模型替代通用鲁棒性。
Key Insight / Why It Works
最关键的原因是:它把耦合和切换从“未知复杂性”变成“已知结构”。对理想模型,控制律几乎是按逆模型写出来的,所以误差动态直接线性化,稳定性证明只是顺势而为,不是靠很深的非线性技巧。对非理想模型,作者没有试图证明全局鲁棒,而是把几何误差、电机跟踪误差作为有界扰动注入,再用单个 Lyapunov 函数给出 UUB 上界。这说明论文真正的贡献更像是“结构化逆模型 + 局部稳定闭环”的组合,而不是某种强鲁棒控制新理论。辅助性最强的部分是具体不等式推导;核心贡献则是这种把 hybrid 机械结构显式编码进控制律的建模方式。
Relation To Prior Work
它最接近的是经典非线性反馈线化、分段/切换系统控制,以及 crane trajectory tracking 这一条谱系,但本质上又不是这些工作的简单延伸。与 gantry crane 轨迹跟踪相比,这里不是在处理吊载摆动,而是在处理串联机械臂式的缆驱几何反演;与一般 switched control 相比,这里切换不是人为模式切换,而是由机械接触状态触发的 hybrid dynamics;与以往 LSMS 自动化工作相比,早期更多是系统级自动化框架或 inverse kinematics,而这篇把“轨迹跟踪闭环”补成了一个有稳定性证明的控制层。真正新增的信息不是“又一个控制器”,而是把 LSMS 的接触切换结构整理成可直接用于闭环设计的数学对象。
Dataset / Evaluation
评估不是数据集驱动,而是真机系统验证。它覆盖了单独控制 waist、shoulder、elbow 以及全关节联动,目的不是刷一个平均误差,而是刻意穿越所有切换模式,检查控制律在 hybrid 边界上的行为。这个实验设计对论文主张是匹配的,因为它验证了“分段控制 + 切换判定”是否真的能跑起来;但它并没有覆盖更难的场景,例如外部扰动、未知负载、长时间热漂移、路径重规划或末端接触交互,所以只能支持“轨迹跟踪可行且误差小”,不能支持更强的 autonomous manipulation 结论。
Limitation
这套方法成立的前提很硬:几何必须足够准,切换阈值必须可预知,缆索必须始终张紧,低层速度环不能太差。只要这些条件松动,控制律就会从“精确反演”退化为“带模型误差的补偿”,此时性能上限会非常依赖参数保守性和工作包络。另一个上限是任务层级:它解决的是关节轨迹跟踪,不是任务空间的自主抓取/放置;因此论文标题里的“复杂 trajectories avoid obstacles and pickup regolith”更多是应用场景愿景,而非控制本体已经统一解决的能力。若未来要扩展到真正的现场部署,主要瓶颈很可能在感知、状态估计和负载交互,而不是当前这条 tracking law 本身。
Takeaway
- 这篇论文最值得记住的不是误差有多小,而是它证明了:对于这类缆驱长臂机构,最有效的路线不是更重的通用鲁棒控制,而是把机械几何、接触模式和张紧约束先做成显式模型,再在这个模型上做近似逆控制。
- 这个 insight 可迁移到很多“轻量化但强耦合”的机器人系统:只要结构信息足够强,控制器就应该优先吃结构,而不是先假装结构不存在。
- 未来真正值得做的是把这套 tracking 扩展到任务空间、扰动负载、以及在线几何/状态不确定下的自适应切换控制。
一句话总结
这是一篇典型的结构驱动型控制论文:它针对 LSMS 这种带离散接触模式的缆驱串联起重机,用显式几何反演和切换 Lyapunov 分析把复杂 hybrid 动力学压成可证明的轨迹跟踪闭环。