主页
← RSS2024 Index
RSS2024 Paper 127
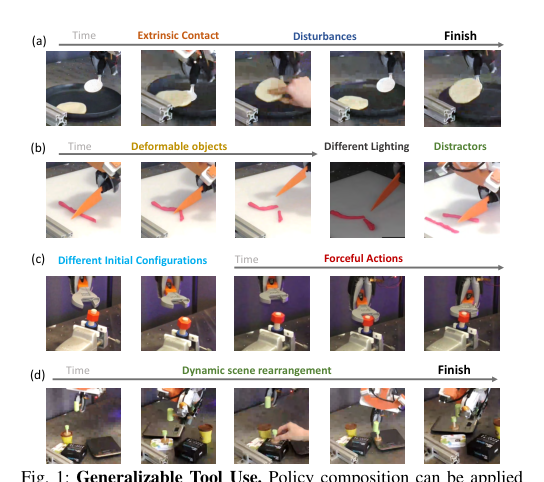
PoCo: Policy Composition from and for Heterogeneous Robot Learning
Lirui Wang, Jialiang Zhao, Yilun Du, Edward Adelson, Russ Tedrake
数据
机器人学习
操作
灵巧手
触觉
基础模型
新标签打开 AlphaXiv
新标签打开 arXiv
新标签打开 Project
AlphaXiv 中文概览(可滚动查看)