主页
← RSS2024 Index
RSS2024 Paper 134
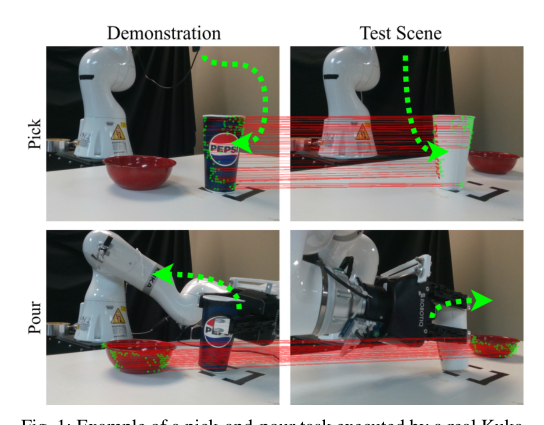
One-Shot Imitation Learning with Invariance Matching for Robotic Manipulation
Xinyu Zhang, Abdeslam Boularias · Rutgers University
模仿学习
操作
感知
机器人学习
灵巧手
仿真到现实
新标签打开 AlphaXiv
新标签打开 arXiv
新标签打开 Project
AlphaXiv 中文概览(可滚动查看)