主页
← RSS2025 Index
RSS2025 Paper 028
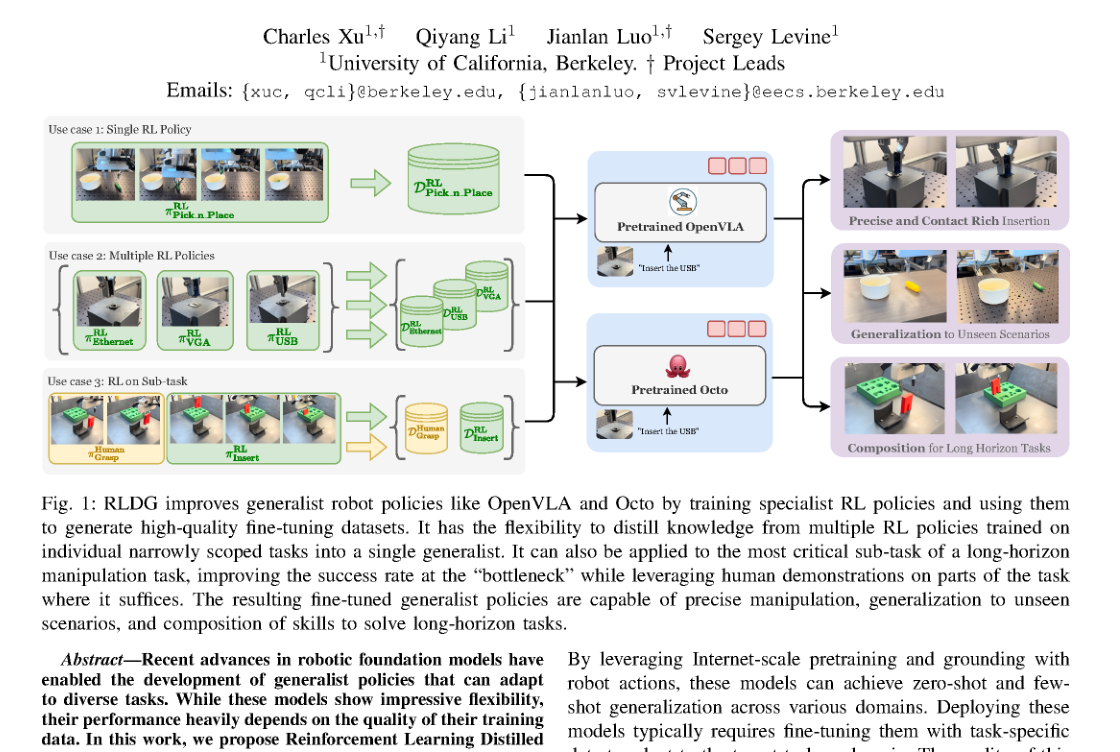
RLDG: Robotic Generalist Policy Distillation via Reinforcement Learning
Charles Xu, Qiyang Li, Jianlan Luo, Sergey Levine
机器人学习
基础模型
强化学习
触觉
操作
数据
新标签打开 AlphaXiv
新标签打开 arXiv
新标签打开 Project
AlphaXiv 中文概览(可滚动查看)