主页
← RSS2025 Index
RSS2025 Paper 029
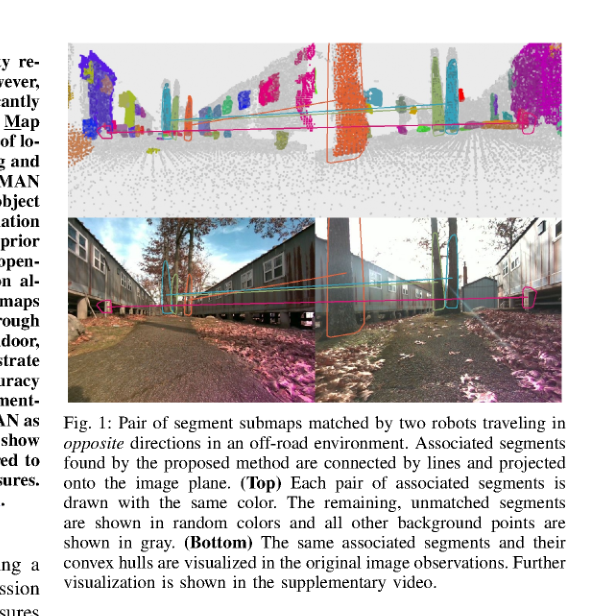
ROMAN: Open-Set Object Map Alignment for Robust View-Invariant Global Localization
Mason Peterson, Yixuan Jia, Yulun Tian, Annika Thomas, Jonathan P. How
机器人学习
SLAM/定位
数据
导航
基础模型
感知
新标签打开 AlphaXiv
新标签打开 arXiv
新标签打开 Code
AlphaXiv 中文概览(可滚动查看)