主页
← RSS2025 Index
RSS2025 Paper 031
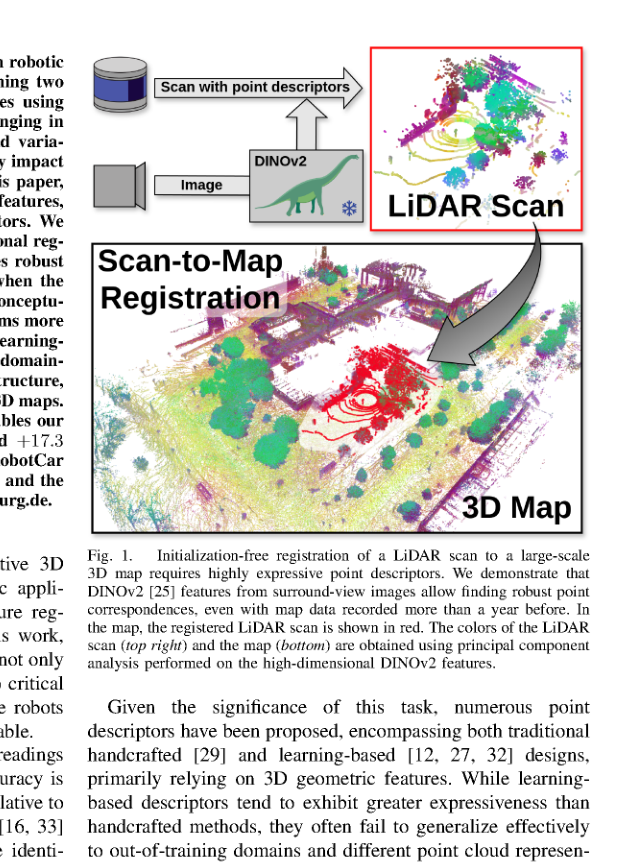
LiDAR Registration with Visual Foundation Models
Niclas Vödisch, Giovanni Cioffi, Marco Cannici, Wolfram Burgard, Davide Scaramuzza
感知
基础模型
机器人学习
灵巧手
数据
SLAM/定位
新标签打开 AlphaXiv
新标签打开 arXiv
新标签打开 Code
AlphaXiv 中文概览(可滚动查看)