主页
← RSS2025 Index
RSS2025 Paper 034
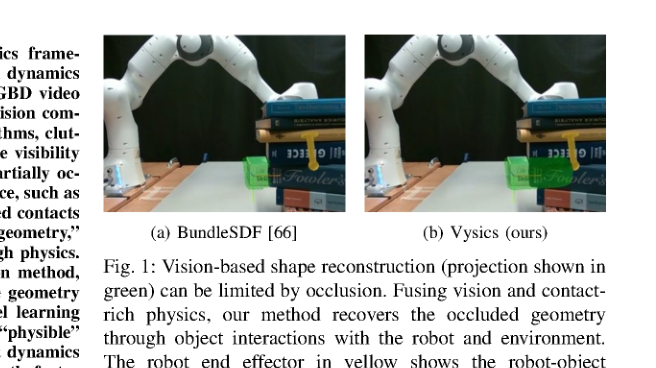
Vysics: Object Reconstruction Under Occlusion by Fusing Vision and Contact-Rich Physics
Bibit Bianchini, Minghan Zhu, Mengti Sun, Bowen Jiang, Camillo Jose Taylor, Michael Posa
机器人学习
感知
控制
触觉
操作
SLAM/定位
新标签打开 AlphaXiv
新标签打开 arXiv
新标签打开 Project
AlphaXiv 中文概览(可滚动查看)