主页
← RSS2025 Index
RSS2025 Paper 035
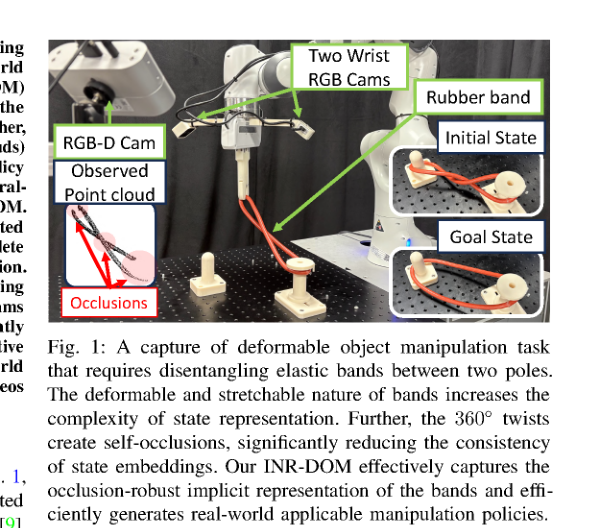
Implicit Neural-Representation Learning for Elastic Deformable-Object Manipulations
Jeongho Ha, Minseok Song, Bonggyeong Park, Daehyung Park
操作
强化学习
机器人学习
感知
触觉
新标签打开 AlphaXiv
新标签打开 arXiv
新标签打开 Project
AlphaXiv 中文概览(可滚动查看)