主页
← RSS2025 Index
RSS2025 Paper 052
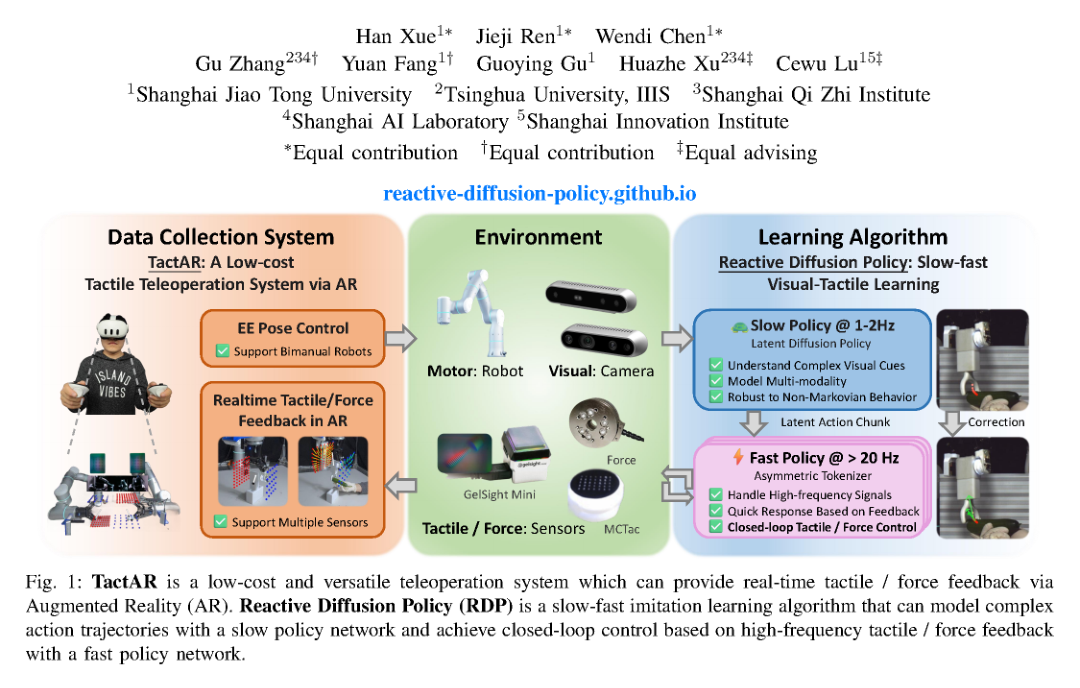
Reactive Diffusion Policy: Slow-Fast Visual-Tactile Policy Learning for Contact-Rich Manipulation
Han Xue, Jieji Ren, Wendi Chen, Gu Zhang, Fang Yuan, Guoying Gu, Huazhe Xu, Cewu Lu
触觉
感知
扩散策略
操作
机器人学习
模仿学习
新标签打开 AlphaXiv
新标签打开 arXiv
AlphaXiv 中文概览(可滚动查看)