主页
← RSS2025 Index
RSS2025 Paper 054
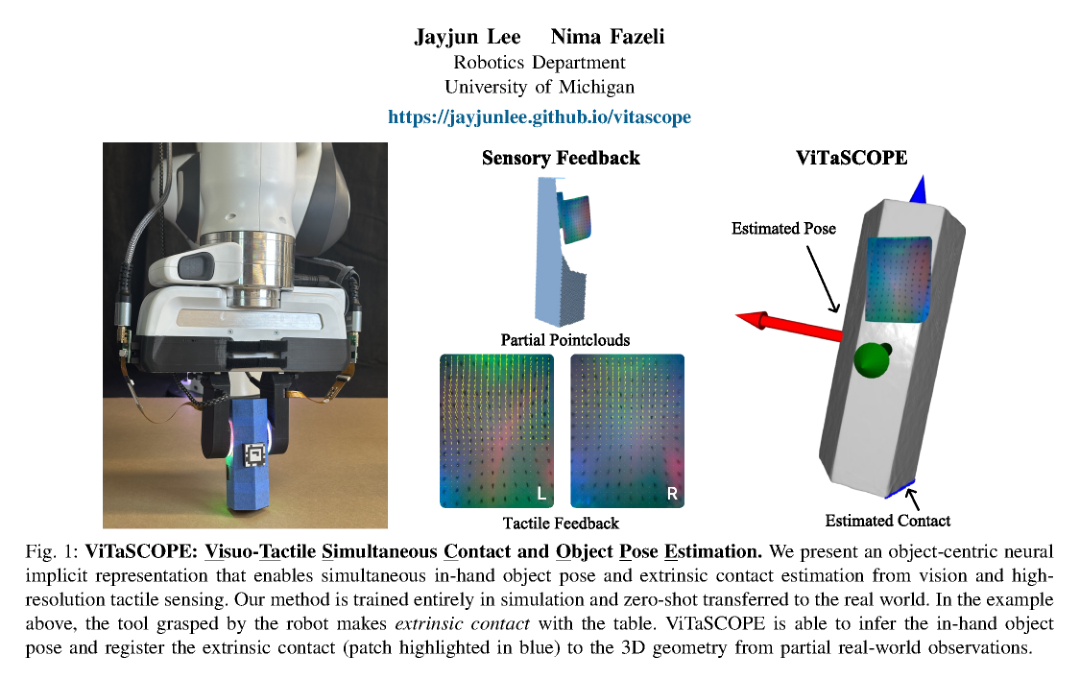
ViTaSCOPE: Visuo-tactile Implicit Representation for In-hand Pose and Extrinsic Contact Estimation
Jayjun Lee, Nima Fazeli
触觉
操作
灵巧手
感知
仿真到现实
SLAM/定位
新标签打开 AlphaXiv
新标签打开 arXiv
AlphaXiv 中文概览(可滚动查看)