主页
← RSS2025 Index
RSS2025 Paper 060
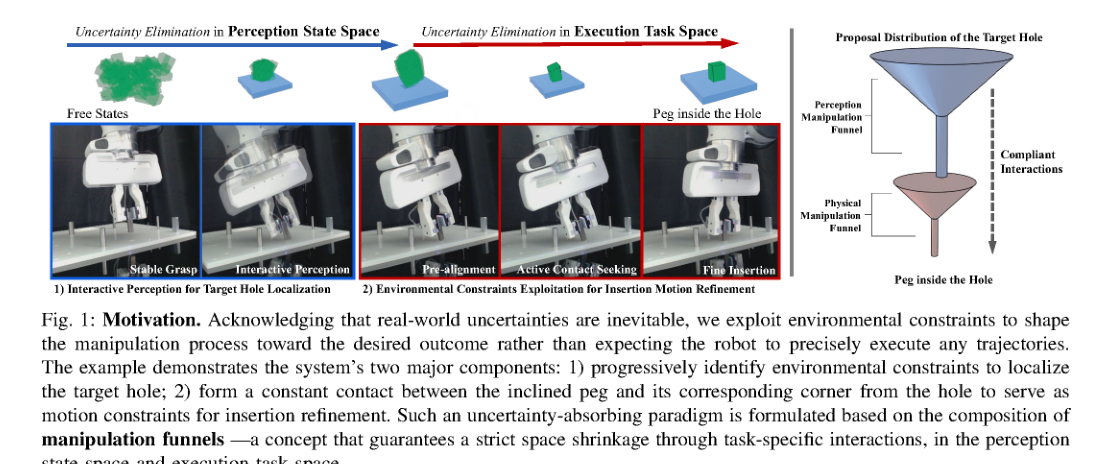
Robust Peg-in-Hole Assembly under Uncertainties via Compliant and Interactive Contact-Rich Manipulation
Yiting Chen, Kenneth Kimble, Howard H. Qian, Podshara Chanrungmaneekul, Robert Seney, Kaiyu Hang
机器人学习
操作
安全
人机交互
感知
新标签打开 AlphaXiv
新标签打开 arXiv
AlphaXiv 中文概览(可滚动查看)