主页
← RSS2025 Index
RSS2025 Paper 063
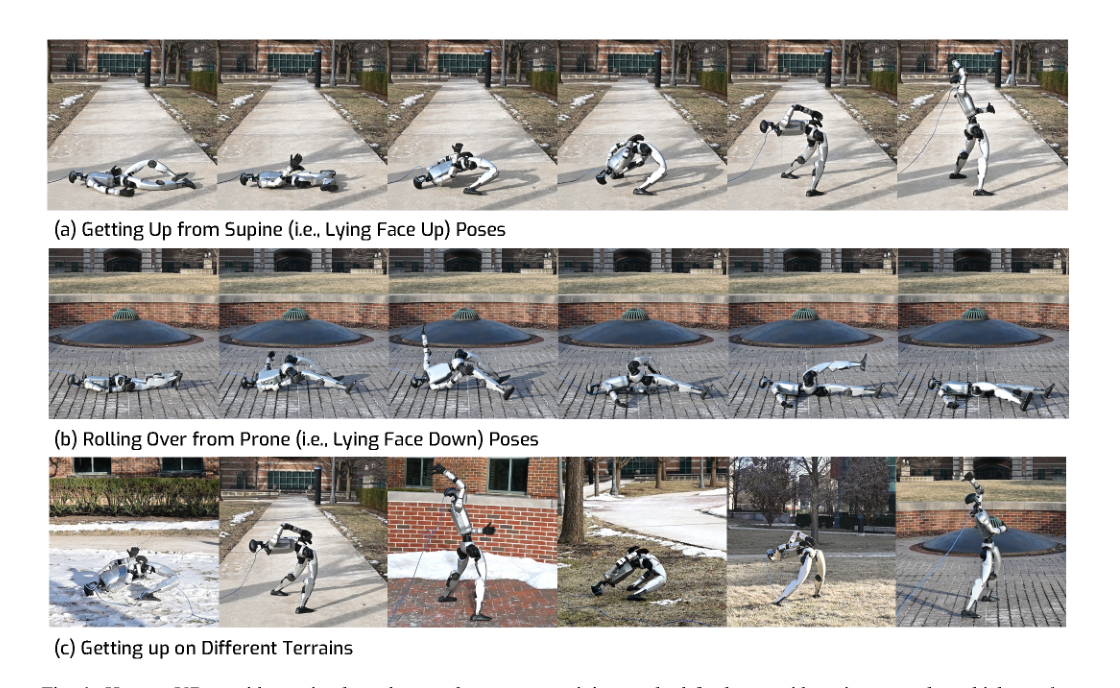
Learning Getting-Up Policies for Real-World Humanoid Robots
Xialin He, Runpei Dong, Zixuan Chen, Saurabh Gupta
机器人学习
腿足机器人
安全
控制
灵巧手
强化学习
新标签打开 AlphaXiv
新标签打开 arXiv
新标签打开 Project
AlphaXiv 中文概览(可滚动查看)