主页
← RSS2025 Index
RSS2025 Paper 068
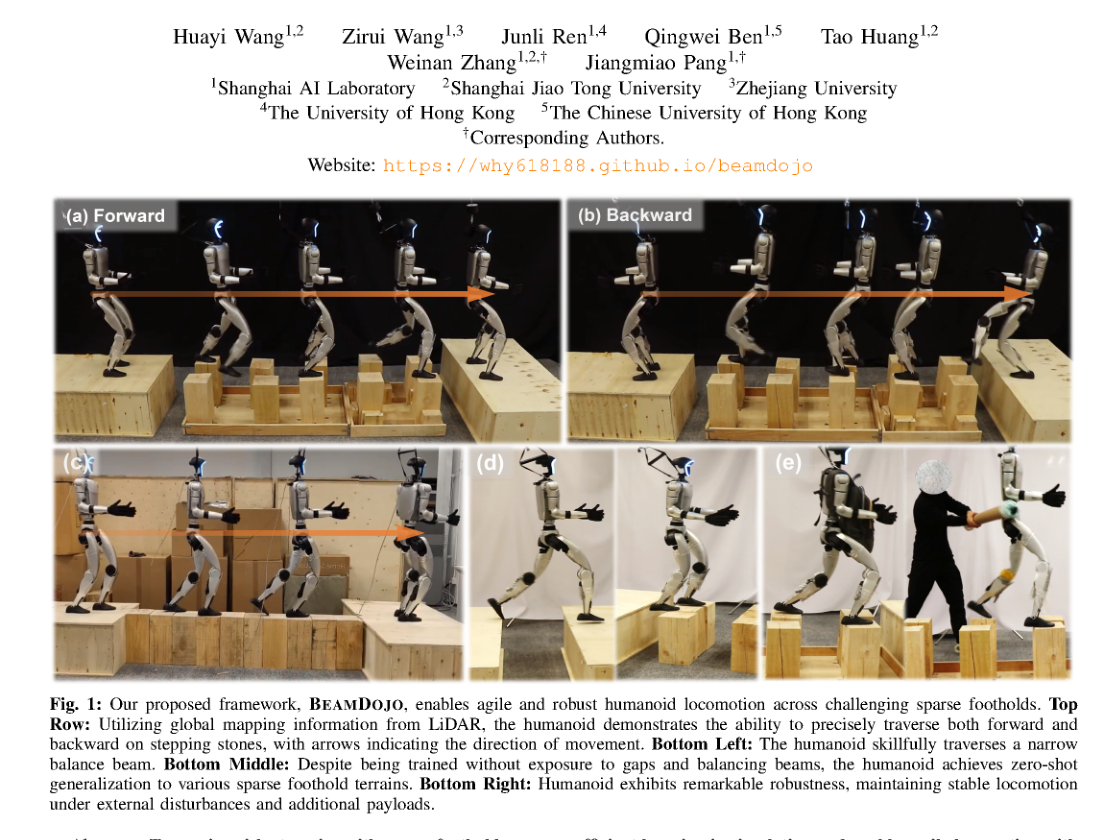
BeamDojo: Learning Agile Humanoid Locomotion on Sparse Footholds
Huayi Wang, Zirui Wang, Junli Ren, Qingwei Ben, Tao Huang, Weinan Zhang, Jiangmiao Pang
腿足机器人
强化学习
操作
机器人学习
安全
感知
新标签打开 AlphaXiv
新标签打开 arXiv
AlphaXiv 中文概览(可滚动查看)