主页
← RSS2025 Index
RSS2025 Paper 069
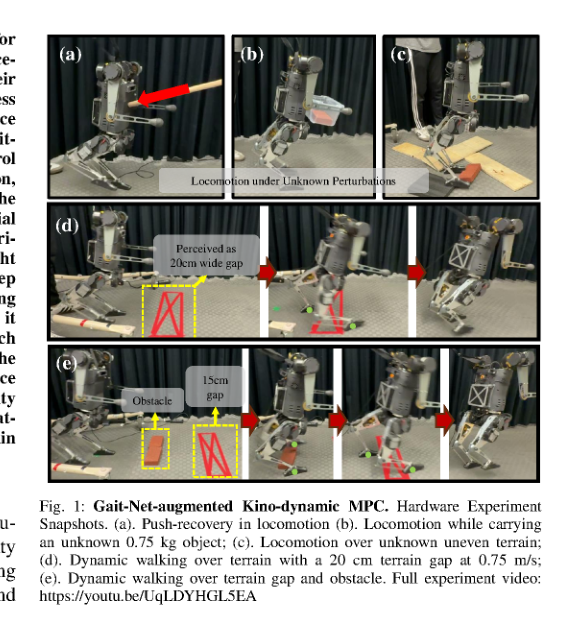
Gait-Net-augmented Implicit Kino-dynamic MPC for Dynamic Variable-frequency Humanoid Locomotion over Discrete Terrains
Junheng Li, Ziwei Duan, Junchao Ma, Quan Nguyen
腿足机器人
规划
控制
安全
操作
数据
新标签打开 AlphaXiv
新标签打开 arXiv
AlphaXiv 中文概览(可滚动查看)