精读笔记
Problem Setting
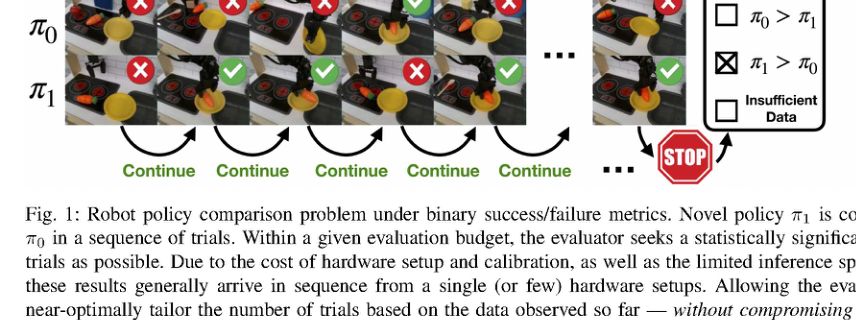
它实际解决的是“两条 policy 的胜负比较在小样本、昂贵 rollout、binary 成败指标下如何可靠且省样本地完成”。真正困难不是做检验本身,而是把检验做成一个可以在线停止、还能维持显著性控制的过程。
以前方法的卡点在于 batch 依赖:必须先定死 N,再做一次性判断。这样要么过于保守,要么在接近边界时无法继续积累证据。这个任务的关键矛盾是:**越需要判断的难例,越需要更多 trial;但 trial 又最贵**。
Motivation
已有路线不够的根本原因是:它们把 policy comparison 视为静态问题,默认 evaluator 能够一次性支付足够预算,并且不需要在过程中对证据强弱做决策。但机器人评估里恰恰相反:预算小、trial 贵、结果顺序到达,而且比较往往非常接近。
作者的核心观察是:真正需要的是**可安全延迟决策**的统计框架。也就是说,缺的不是一个更会打分的 baseline,而是一个能在证据不足时保持克制、在证据充分时提前收手的 stopping mechanism。
Core Idea
这篇论文的核心思想很直接:不要把 policy comparison 当成一个一次性 batch decision,而要当成一个 sequential stopping problem。其本质变化是从“先决定样本量,再做检验”改成“每个 trial 都更新证据、实时决定是否已经足够”。
这带来的 inductive bias 不是更强的模型,而是更强的**证据利用效率**:easy case 早停,hard case 继续采样,极端接近时允许不轻率下结论。和 prior 的本质区别在于,它不是在评估统计量上做小修小补,而是重写了 evaluation protocol 的时间结构。
Method
关键机制只有一件事:把两策略比较写成可在线更新的 sequential test,并让 stopping rule 适配当前已观测证据。
它解决的是 batch test 的两个痛点:一是固定样本数导致 easy case 浪费 trial;二是中途追加样本会带来 p-hacking 风险。引入 sequential stopping 后,核心变化是 evaluation budget 不再预先死锁,而是由 observed evidence 决定。
从机制上看,这不是普通的 confidence interval 置信判断,而是一个围绕 Type-I / Type-II 约束设计的决策过程。它的价值在于把“是否继续试验”本身变成被统计保证覆盖的动作。
Key Insight / Why It Works
它之所以有效,核心不是因为某个复杂模块,而是因为它对问题结构的把握更准确:比较两个 policy 时,真正可用的信息非常少,而且每个 trial 都昂贵,所以最重要的是把**停止时机**设计好。近似 SPRT 的好处就在这里——如果两者差异明显,就尽早停止;如果差异微弱,就不要强行给出过度自信的结论。
我认为最核心的贡献是“把统计显著性和自适应预算统一起来”,而不是某种新的建模技巧。次要贡献才是 multi-task/multi-policy 的 reduction。最可能的辅助因素是:它在有限 Nmax 下比某些保守 sequential baseline 更敢用完风险预算,所以看起来更“聪明”;但本质上这仍然是更好的 finite-sample sequential design,而不是新的机器人学习 insight。
Relation To Prior Work
它最接近经典 sequential hypothesis testing / SPRT,以及机器人评估里已有的 batch policy comparison 和若干 sequential baseline。真正不同点不是“又一个检验”,而是**把近最优 stopping 的思想专门适配到机器人 policy comparison 的小样本现实**。
看起来新颖的地方在于机器人语境,但本质上它继承的是统计决策谱系,而不是学习谱系。相较于 prior work,它新增的关键信息是:在有限预算 Nmax 的现实条件下,应该优先优化 stopping efficiency,而不是只追求 asymptotic correctness。换句话说,它是在有限时域里重新分配统计风险预算。
Dataset / Evaluation
评估覆盖了仿真和真实机器人操控,且同时看了单任务、跨任务和 multi-policy / multi-task 的比较场景,这一点是对作者主张的必要支撑,因为方法的卖点正是“在难度不同的比较中自适应停止”。
但 evaluation 仍然主要在 binary success/failure 的设置下成立,验证的是统计比较框架,而不是更广义的 policy quality understanding。它确实支撑了“能省 trial、能保正确性”的 claim,但对“真实复杂部署中是否仍有同样的边际收益”支撑有限。
Limitation
方法依赖强 i.i.d. 假设和二元 outcome 压缩,这对真实机器人评估并不总成立。只要环境 reset 有漂移、同一 policy 的 trial 间存在相关性、或者 task 的成功/失败不是自然二分,保证就会明显打折。
另一个隐含上限是:它优化的是比较协议,不是策略本身,因此如果 benchmark overlap 很强、或结果主要由数据覆盖/场景覆盖决定,那么 improvement 可能只是更会“用样本”,并不意味着对 policy generalization 有更深洞察。文中未充分说明在更复杂的多重比较、依赖比较、或动态基准更新场景里,这个框架是否仍然稳健。
Takeaway
- 1) 在机器人 imitation learning 的评估里,真正值得优化的往往不是更强的 policy metric,而是更好的 comparison protocol。
- 2) 对 binary success/failure 场景,sequential test 比 batch test 更符合真实 workflow,因为评估本身就是昂贵且顺序到达的。
- 3) 这篇工作的主要价值是统计协议层面的“样本节省”,不是学习能力的跃迁;它最可迁移的 insight 是:当预算稀缺且 decision 可延迟时,应该优先设计 near-optimal stopping 而不是固定 N 的粗糙评估。
- 4) 如果未来要继续推进,这条线真正值得做的是:从二元、i.i.d. 比较扩展到更一般的非平稳、多任务、相关 trial 和 richer metrics,而不是继续堆评估数字。
一句话总结
这是一篇把机器人 policy comparison 从固定样本的 batch testing 重写为近最优 sequential stopping 的统计方法论文,核心贡献是用更合理的停止机制在小样本、高成本评估中省 trial、保正确性,而不是提出新的学习器。