主页
← RSS2025 Index
RSS2025 Paper 084
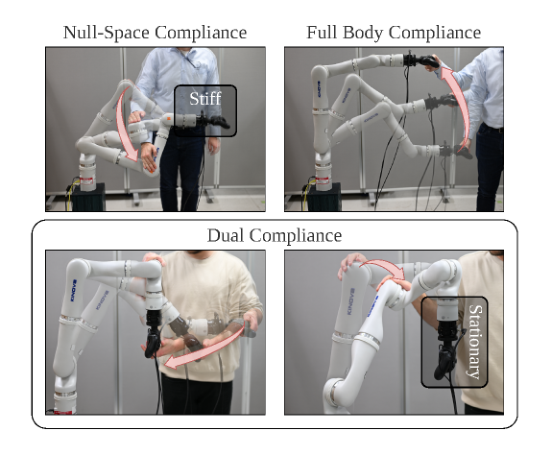
Demonstrating a Control Framework for Physical Human-Robot Interaction Toward Industrial Applications
Bastien Muraccioli, Mathieu Celerier, Mehdi Benallegue, Gentiane Venture
机器人学习
控制
人机交互
安全
触觉
新标签打开 AlphaXiv
新标签打开 arXiv
AlphaXiv 中文概览(可滚动查看)