精读笔记
Problem Setting
它在解决的不是一般的多机器人规划,而是‘信息分布驱动的连续轨迹优化 + 间歇连通性’的耦合问题。真正难点是两个目标冲突:越强调通信,轨迹越容易偏离高信息区域;越强调信息覆盖,机器人越容易失联。以前的方法要么把通信当成硬前提,要么把 rendezvous 变成离散计划,导致和 ergodic 这种全轨迹统计目标不兼容。这个任务的关键矛盾其实是:你要优化的是长期统计分布,但通信约束传统上是瞬时事件。
Motivation
作者的核心观察是:多机器人信息收集真正的瓶颈,不是怎么更快到处跑,而是怎么在不丢失信息交换能力的前提下尽量少打断自己的信息采样节奏。已有工作要么默认全局通信,要么提前锁死连接计划,这都把最难的协调层面绕开了。作者想补的缺口,是一个能让连通性以“软统计”的方式自然嵌入 ergodic 优化的接口。
Core Idea
这篇论文的核心不是“又加了一个连通性约束”,而是把连通性重新定义成一种轨迹统计量:机器人是否‘足够连通’,由它们在长时间尺度上是否经常落入可通信关系决定,而不是由某几个 rendezvous 时刻决定。这样一来,连通性从一个时空事件问题,变成一个分布匹配问题,和 ergodic search 的建模逻辑完全对齐。理论上,这很重要,因为 ergodic 本来就在优化时间平均统计;作者等于把约束项也改写成同一类统计对象,于是目标与约束在表示层面统一了。
Method
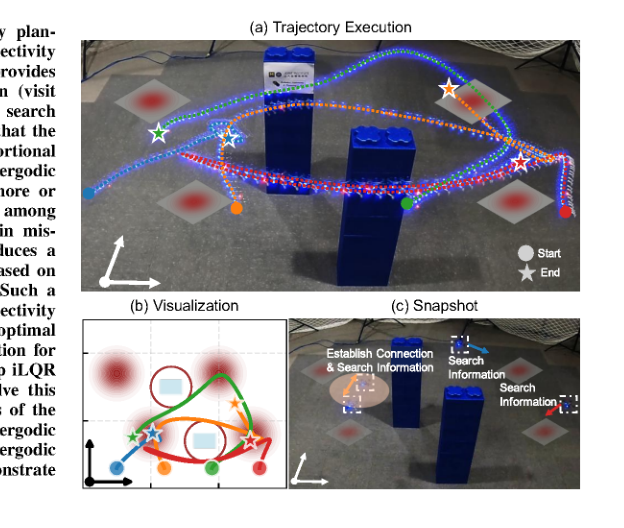
关键机制只有三步。第一步,把信息收集写成 ergodic objective,不再做贪心信息增益或完全覆盖。第二步,把 inter-robot connectivity 写成基于时间平均统计的软约束,而不是固定拓扑或显式 rendezvous 计划;这一步决定了方法能否和轨迹优化兼容。第三步,把整个问题作为 OCP 来解,并用 ALM 处理约束、iLQR 做局部迭代优化。这里不需要把求解器看得太重;真正决定方法上限的是第二步的建模选择。
Key Insight / Why It Works
它之所以可能有效,核心在于把两个本来冲突的过程放到了同一种时间平均视角里。Ergodic search 关心的是“轨迹占据分布”是否匹配信息分布;作者的连通性度量关心的是“两条轨迹的统计共现”是否足以支撑通信。二者都不是瞬时控制,而是长期统计,因此可以自然地互相叠加,而不会像显式 rendezvous 那样引入强离散结构。 这里最像真正贡献的,是这个 inductive bias:鼓励机器人不是局部追逐会合点,而是在全局上形成“经常可连”的统计结构,同时保持对高信息区域的覆盖。最可能的核心增益来自更好的问题表述和优化可微性,而不是 iLQR/ALM 本身;后者更像是把这个表述跑起来的工程载体。 另外要直接判断:所谓“概率”并不是真正的任务成功概率,更像是时间平均共现的代理指标。它成立的前提是任务确实只需要间歇交换信息,且长期统计足以代表任务价值;如果任务对具体会合时刻敏感,那这个代理就会失真。
Relation To Prior Work
它最接近两条谱系:一条是 ergodic control / ergodic search,另一条是 intermittent connectivity maintenance。和前者相比,实质创新不在 ergodic 指标本身,而在把 connectivity 也改写成统计目标;和后者相比,创新不在连通性维护,而在放弃显式会合计划,转而做分布级软约束。看起来像是把已有思想重组,但真正新增的信息是:连通性可以用轨迹时间平均的方式进入连续最优控制,而不必先离散化为 rendezvous schedule。 这也意味着它不是传统的“规划+调度”框架,而是把调度隐式化了。这个变化很关键,因为它把可优化性和 ergodic 兼容性同时保住了。
Dataset / Evaluation
评估覆盖了仿真和多无人机真实演示,说明方法不是纯理论玩具。更关键的是,他们不是只看“是否能连上”,而是检查该概率度量与实际连接时间的相关性,以及加入后对 ergodic metric 的影响。这基本支持了它的 claim:这个统计度量至少能作为优化代理。 但 evaluation 的覆盖面仍有限:主要验证的是少数场景下的连通性-ergodicity 权衡,并没有系统证明对不同地图复杂度、不同机器人规模、不同通信模型都稳健;因此它更像是在证明一种可行的新建模,而不是把问题彻底解决。
Limitation
它最根本的上限在于:把 connectivity 统计化以后,保留的是‘平均上容易连上’,丢掉的是‘某一时刻必须连上’。因此它更适合探索/巡检这类容错高的任务,不适合强实时协同。另一个上限是,方法是否真有更强的泛化能力,文中未充分说明;当前收益很可能主要来自 better inductive bias,而不是学到了某种可迁移的高阶规划能力。再往下看,数值求解仍然是局部优化,复杂障碍、大规模机器人、动态环境下是否稳定,增益来源不清。也就是说,它很可能只是把显式连接调度问题转译成了一个更平滑但仍非凸的连续优化问题,而不是从根上绕开了难点。
Takeaway
- 最值得记住的不是这个具体概率公式,而是建模层面的迁移:当任务本质上依赖长期统计时,连通性也可以被统计化,而不必固执地保持为瞬时约束。
- 这个 insight 可以迁移到任何“主目标是分布匹配、辅目标是间歇协同”的问题里,比如多机器人巡检、分布式搜救、弱通信下的信息汇聚。
- 第二个值得迁移的点是:与其显式求 rendezvous,不如先想能否构造一个与主目标共享同一优化语言的软代理。
一句话总结
这篇工作把多机器人间歇连通性从显式会合调度,重写成与 ergodic search 同尺度的轨迹统计约束,从而把信息覆盖与通信维护统一进一个连续最优控制框架。